

※本記事は継続的に「最新情報へのアップデートと、読者支援機能の強化」を行っています(更新履歴は末尾参照)。
人型ロボットと特化型ロボットの違いは?導入順・ROI・OS選び【2026年版】
人型ロボットと特化型ロボットの違いは、汎用性の高さだけでなく、導入順やROIの描きやすさにもあります。この記事では、人型と特化型の違い、先に導入しやすい領域、OSやAIエコシステム選びの考え方まで、実務目線で整理します。
2026年3月時点でも、まずROIの良い特化型から着手し、人型はPoC(限定実証)〜限定運用で知見とデータを貯めるのが堅実です。
次に重要なのは「頭脳(OS)=AIエコシステム」選びです。どの陣営に自社のロボットとデータを載せるかで、将来の拡張性とロックイン度が大きく変わります。
この記事の著者・監修者 ケニー狩野(Kenny Kano)

役職:(株)アープ取締役。Society 5.0振興協会・AI社会実装推進委員長。中小企業診断士、PMP。著書『リアル・イノベーション・マインド』▶ 詳細はこちら
📍市場全体の地図から見たい方へ
AIが”動き出す”時代:ロボット開発の新たな波

これは、労働力不足や高齢化といった社会課題への対応策としても注目されており、単なる技術革新を超えた変化の兆しと言えるでしょう。
この変化の中で、大きく分けて二つのタイプのロボットが注目されています。
- 汎用型ロボット:
人間のように、様々な環境で多様なタスクを柔軟にこなすことを目指すロボット。特に人間の姿を模した「人型(ヒューマノイド)」の開発競争が続いています。 - 特化型ロボット:
清掃、配膳、部品の組み立て、倉庫内搬送など、特定の作業に最適化されたロボット。すでに多くの現場で活躍しており、AI導入によってさらに進化しています。
読み方のコツ:本記事は「身体(人型/特化型)」よりも、最後に効いてくる「頭脳(OS=AIエコシステム)」で勝ち筋が決まる──この順で読むと理解が速いです。
本記事では、汎用型(人型)と特化型ロボットの現状に焦点を当て、2025〜2026年にかけての開発動向とそれぞれの特徴に加え、その背後で進むVLM/ロボットOSプラットフォームとAIエコシステムの覇権争いまで含めて整理していきます。
ヒューマノイドロボットの躍進:人型の意義と開発最前線
なぜ人間の姿を目指すのでしょうか? この疑問は、ロボット技術の未来を考える上で重要なポイントです。
なぜ「人型」なのか? その理由と意義
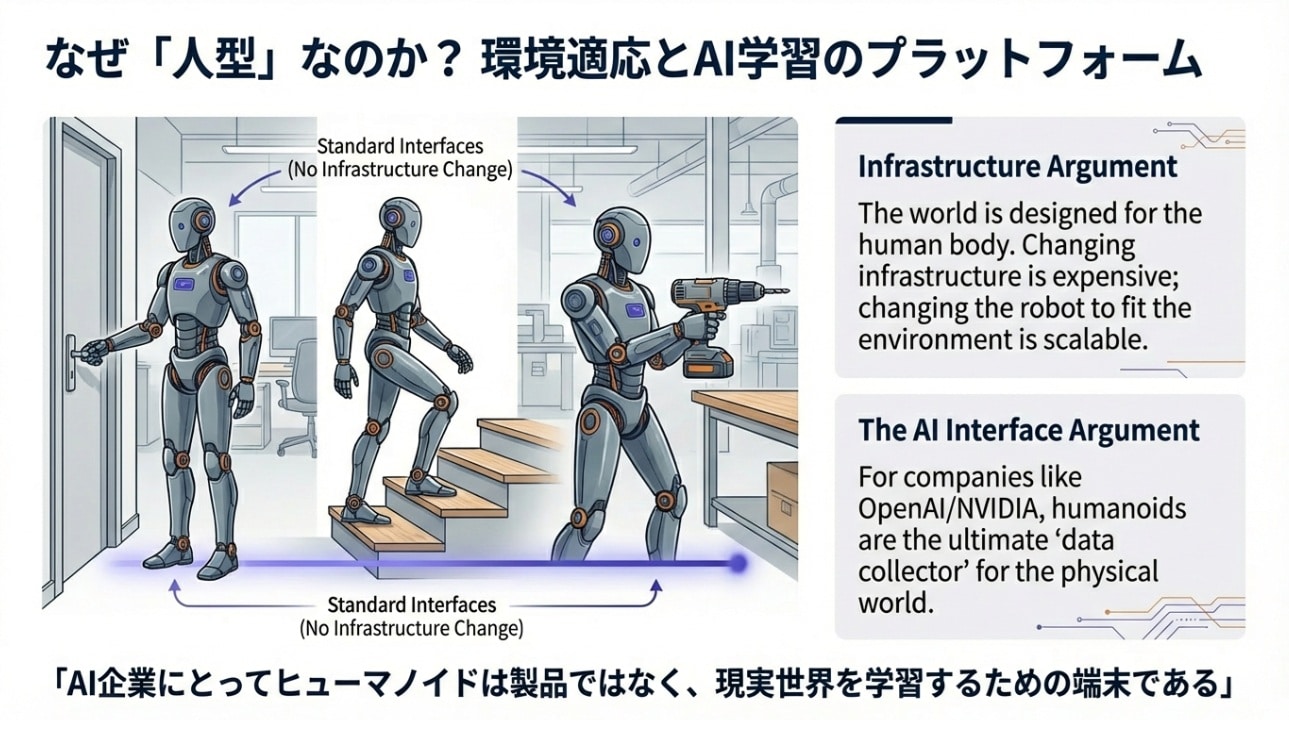
人型(ヒューマノイド)が注目される最大の理由は、「人間向けに作られた世界」をそのまま使える可能性があるからです。ここでは導入障壁を下げる意義を整理します。
人型の本質:世界が“人間の身体”向けに作られている以上、環境改修より「身体を合わせる」方が将来的にスケールしやすい。
多くのSF作品に登場するロボットが人型であるように、私たち人間は直感的に人型のロボットを想像しがちです。しかし、技術開発の観点から見ると、人型ロボットの開発は非常に複雑で困難な挑戦です。それでもなお多くの企業や研究機関が人型を目指すのには、明確な理由と戦略的な意義が存在します。
その最大の理由は、私たちの社会や生活空間が、徹頭徹尾「人間」の身体と能力に合わせて設計・構築されているという事実にあります。
❶ 既存環境への適応:ロボットのために世界を作り変える必要がない

私たちの身の回りを見渡してみてください。建物には階段やドアがあり、通路の幅も人間が通れるように作られています。
机や椅子の高さ、キッチンカウンターの配置、工場の作業台、さらにはドライバーやペンといった道具の形状に至るまで、すべてが人間の身長、腕の長さ、手の形、指の動き、そして二本足で歩行するという特性を前提として設計されています。
もしロボットが車輪型や多脚型、あるいは全く異なる形状をしていた場合、これらの既存環境で活動するには大きな制約が生じます。段差を乗り越えられなかったり、ドアノブを回せなかったり、人間用の道具を使えなかったりするでしょう。
ロボットを導入するために、建物や設備、道具をすべてロボットに合わせて作り変えるとなると、莫大なコストと時間がかかってしまいます。
しかし、人型ロボットであれば、原理的には人間用に作られた環境や設備、道具をそのまま利用できます。
階段を上り、ドアを開け、エレベーターのボタンを押し、人間と同じ道具を使って作業することが可能です。これは、ロボットを社会に導入する際の障壁を大幅に下げ、導入コストを削減できる可能性があることを意味します。つまり、「ロボットのために世界を作り変える」のではなく、「既存の世界に適合できるロボットを作る」というアプローチが、人型ロボット開発の根底にある重要な考え方なのです。
導入障壁の核心:人型は「設備側の改修コスト」を“将来”圧縮できる可能性がある点が強い。
❷ 作業の汎用性:多様なタスクへの対応能力

人間の身体、特に手は、非常に優れた汎用性を持っています。
物を掴む、運ぶ、押す、引く、回す、叩く、書く、道具を使う…など、一つの器官で驚くほど多様な作業をこなすことができます。また、二本足での歩行は、不整地を含めた様々な場所への移動を可能にします。
人型ロボットは、この人間の身体構造を模倣することで、特定の作業に特化せず、原理的には人間ができる様々なタスクに対応できる潜在能力を持ちます。
例えば、工場での部品の組み立て、倉庫でのピッキングや梱包、家庭での掃除や料理、介護施設での身体介助など、異なる種類の作業を学習し、実行できる可能性があります。
もちろん、現在の技術レベルでは人間の器用さや適応能力には遠く及びませんが、AI技術、特に模倣学習や強化学習の進歩により、ロボットが多様なスキルを獲得するスピードは加速しています。将来的には、一台の人型ロボットが複数タスクをこなす方向性が示されていますが、2026年3月時点は「特定タスクを安定運用する」段階が中心です。
注意点:汎用性は魅力だが、現時点は「何でもできる」より「いくつかの作業を安定してできる」段階に近い。
❸ 人間との親和性:自然な協働とコミュニケーション

ロボットが工場の中だけでなく、オフィス、店舗、家庭、病院など、人間の生活空間で活動するようになると、人間との関わり方が非常に重要になります。人型ロボットは、人間と同じような姿形、動き、ジェスチャーをすることで、人間にとって心理的な抵抗感が少なく、より自然なコミュニケーションや協働作業が可能になると考えられています。
例えば、人間が相手に何かを手渡すとき、相手が受け取りやすいように差し出す動作をします。
人型ロボットも同様の動作をすることで、人間は直感的にロボットの意図を理解し、スムーズに物を受け取ることができます。
また、視線や表情(を模したディスプレイ表示など)を通じて、ロボットの状態や意図を伝えることも可能です。
もちろん、「不気味の谷」と呼ばれる、人間に似すぎているがかえって不快感を与える現象への配慮は必要ですが、適切にデザインされた人型ロボットは、人間社会へのスムーズな導入と共存において有利な側面を持つと考えられています。
❹ AIにとっての「学習インターフェース」としての人型
OpenAI や NVIDIA、Tesla などのAI企業にとって、人型ロボットは単なる「製品」ではなく、
AIが現実世界を学び、試行錯誤するための究極のインターフェースという意味を持ちます。
人間のために設計された環境は、段差やドア、道具、人とのコミュニケーションなど、極めて複雑で多様な「データセット」です。
裏テーマ:AI企業にとってヒューマノイドは“製品”というより、現実世界のデータを回収し学習するためのプラットフォーム争いの端末です。
その環境で汎用的に賢く振る舞えるAIを育てるには、人間と同じような制約を持つ「身体」を与えるのが近道だ──
という発想から、AI企業はヒューマノイド開発に戦略的投資を行っています。
彼らの最終ゴールは、必ずしもロボットメーカーになることではなく、
クラウドから工場・倉庫・家庭に至るまでを統合する「フィジカルAIプラットフォーム」の覇権を取ることにあります。
これらの「既存環境への適応力」「作業の汎用性」「人間との親和性」という利点から、特に人間と共存する環境や、予測不能な状況下で多様な作業が求められる場面において、人型ロボットは大きな役割を果たす可能性が指摘され、2026年3月時点でも世界中で開発競争が継続しています。
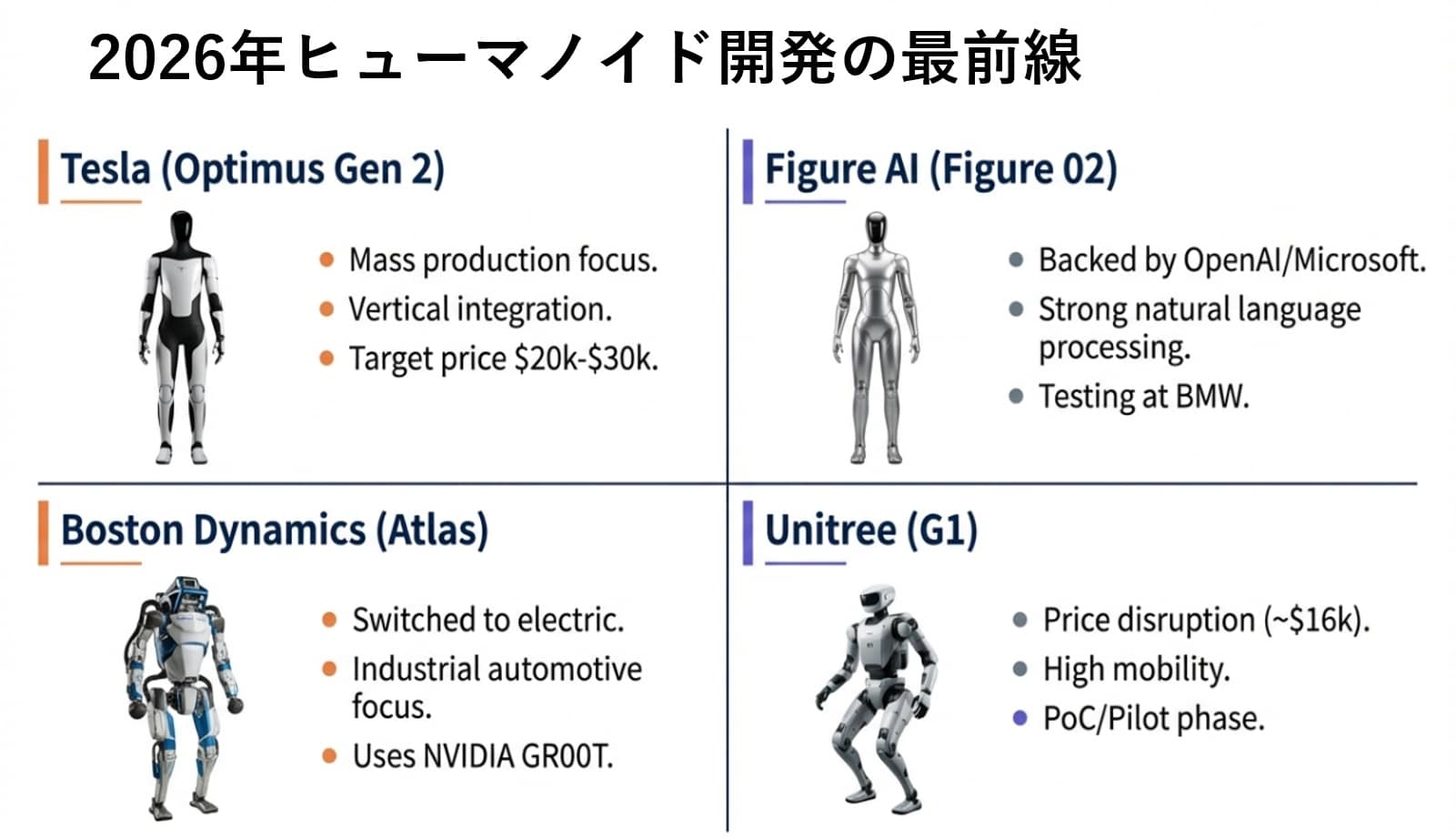
開発競争の最前線:注目のヒューマノイド(2026年3月時点)
読み分け:各社の違いは「ロボット本体」より、背後の“頭脳スタック(VLM/学習基盤/データ基盤)”に出ます。
❶ Tesla社 Optimus (Gen 2) (米国)
電気自動車(EV)大手 Tesla社が開発。EVで培った自動運転技術(FSD由来のVLM)、バッテリー、モーター技術を活用したヒューマノイドです。
現在公開されている最新プロトタイプとして知られるのは「Optimus Gen 2」で、軽量化や手の精密性が向上し、自社工場内での限定的なテスト運用を進めています。
Musk氏は長期的にロボットの価格帯を2万〜3万ドル程度に抑えたいと語ってきましたが、これはあくまで長期目標としての価格感であり、2026年3月時点で具体的な販売価格や発売時期は未公表です。
将来的に人間の労働力の一部を代替できる存在とすることを目指しています。
[Tesla AI 公式サイト]
❷ Figure AI社 – Figure 02 / Figure 03 (米国)
2022年設立の新興企業ながら、OpenAI、Microsoft、NVIDIAなどから巨額の資金を調達し注目を集めてきた企業です。
第2世代のFigure 02はBMWの米国工場(サウスカロライナ州・Spartanburg)での10か月にわたるパイロットを完了し、Figure社は週5日・1日10時間シフト、累計1,250時間以上のランタイム、シートメタル部品90,000個以上の搬送などを公表しています(いずれもFigure社の発表値)。
2026年3月時点では、Figure 02は退役開始が公表されており、BMW × FigureはFigure 03での追加ユースケース評価へ移行しています。
[Figure AI BMW運用実績(公式)]
ポイント:BMW工場での実績は重要ですが、一次情報でも「誰の発表か」「検証の有無」を分けて読む姿勢が重要です。
❸ Boston Dynamics社 – Atlas(電動)(米国)
驚異的な運動能力で知られるBoston Dynamics社(現代自動車グループ傘下)が、従来の油圧式から完全電動式の新型Atlasを発表。
Boston Dynamicsは2026年1月のCES 2026で産業向け量産版(プロダクション版)を正式公開しており、56DoF(自由度)、7.5フィート(約2.3m)のリーチ、110ポンド(約50kg)の持ち上げ能力などを公表しています。さらに、NVIDIAのIsaac GR00TプラットフォームとJetson Thor計算基盤を採用する構成が明示されています。
またBoston Dynamicsは、2026年生産分をHyundai Motor GroupのRobot Metaplant Application Center(RMAC)とGoogle DeepMind向けに配備する計画を示しています。
RMACは、Georgia州のHyundai Motor Group Metaplant Americaへの本格配備に先立って、ロボットを訓練・検証するためのハブです。追加顧客への展開は2027年以降の見通しであり、Georgia州Metaplantへの本格展開はその次の段階として位置づけられます。
[Boston Dynamics CES 2026発表(公式)]
[Boston Dynamics × NVIDIA 連携(公式)]
[Boston Dynamics 公式サイト]
❹ Agility Robotics社 – Digit (米国)
二足歩行ロボットDigitを開発。Amazonの物流センターでのテスト運用などで実績を積んでおり、
荷物運搬(最大35ポンド/約16kg)や移動能力に優れています。
生成AIを活用した指示理解能力も開発中で、2024年から商業展開を本格化させており、2026年3月時点でも量産体制の構築と顧客向けデプロイに向けた動きが継続しています。
[Agility Robotics 公式サイト]
❺ UBTECH社 – Walker S (中国)
中国を代表するロボット企業。等身大二足歩行ロボットWalker Sは、EVメーカーZeekrの工場で稼働するなど産業応用を推進。マルチモーダルAIによる認識能力や、複数台連携機能も特徴。中国の国家戦略を背景に開発が進んでいます。
[UBTECH Robotics 公式サイト(英語)]
❻ Unitree社 – H1 / G1 (中国)
四足歩行ロボットで有名ですが、人型ロボットH1、G1も開発。特にG1は公式ショップ上で13,500ドルと比較的低価格帯の人型ロボットとして注目されており、高い運動性能やバランス能力をデモで示しています。普及価格帯の汎用ロボットがどこまで現実味を持つかを占う存在です。
[Unitree Robotics 公式サイト]
[Unitree公式ショップ(価格)]
こうしたプレイヤーの背後では、「人型 vs 特化型」という“身体”の違いを超えて、
どのAI(頭脳)がロボットを支配するか、そのOS/プラットフォームにどれだけ開発者とデータが集まるか──というOS戦争が進んでいます。
.jpg)
その主役は、現実世界を「見て・理解する」ためのVLM(視覚言語モデル)と、それを支える開発基盤です。
2026年3月時点の代表的なプラットフォームを整理すると、次の通りです。
| VLM / OS(プラットフォーム) | 開発元 | 概要 | 主な特徴・強み | 主な採用例・連携 |
| Helix / Helix 02(VLA) | Figure AI | Figure独自のVision-Language-Action(VLA)モデル。Figure 03を含む次世代機での運用を前提に開発。 | System 0 / 1 / 2 の階層構造で、全身の「pixels → actions」を統合制御する設計が特徴。 | Figure 03の頭脳として展開。Figure AIは2025年にOpenAI連携を終了し、独自モデル路線へ転換。 |
| NVIDIA Isaac GR00T(VLM/PF) | NVIDIA | IsaacシミュレータとJetson計算基盤をつなぐロボット向け基盤モデル/開発スイート。 | シミュレーション→実機への学習移転が中核。Omniverse/Isaac Lab等の開発環境と統合しやすい。 | Boston Dynamics(Atlas)などで採用が公式に明示。Jetsonベースのロボット群への展開が進む。 |
| Tesla Optimus VLM(VLM) | Tesla | 自動運転FSDで培った「映像入力→行動出力」技術をヒューマノイド向けに最適化した社内向けVLM。 | 車両・工場・ロボットまでデータとハードを垂直統合し、自社工場内での最適化に特化。 | Optimus(Gen 2)の「頭脳」として活用される方向性。 |
| RT-2(Robotic Transformer) | Google DeepMind | Web上のテキストと画像から学習し、ロボットの行動を直接生成するVLM。 | 研究色が強い一方で、「言語→行動」へつなぐ発想の代表例。商用PFというより、汎用ロボット学習の方向性を示す位置づけ。 | Googleの研究用ロボットアームなどでの実験的活用。 |
| ROS 2(OS/ミドルウェア) | Open Robotics(OSS) | ロボットの通信・制御を担う「事実上の標準」OS/ミドルウェア。頭脳ではなく神経系に相当。 | オープンで中立。多様なVLMと組み合わせ可能で、既存資産との互換性が高い。 | 多くの特化型ロボットや研究開発プラットフォームで採用。 |
特化型ロボットの進化と共存:効率性とAIによる高度化
華やかな人型ロボット開発と並行して、特定のタスクに最適化された「特化型ロボット」も、AIやセンサー技術を取り込み進化を続けています。これらは依然として多くの産業や社会の現場を支える主役であり、その効率性やコスト面での優位性は揺るぎません。
特化型ロボットの揺るぎない強み
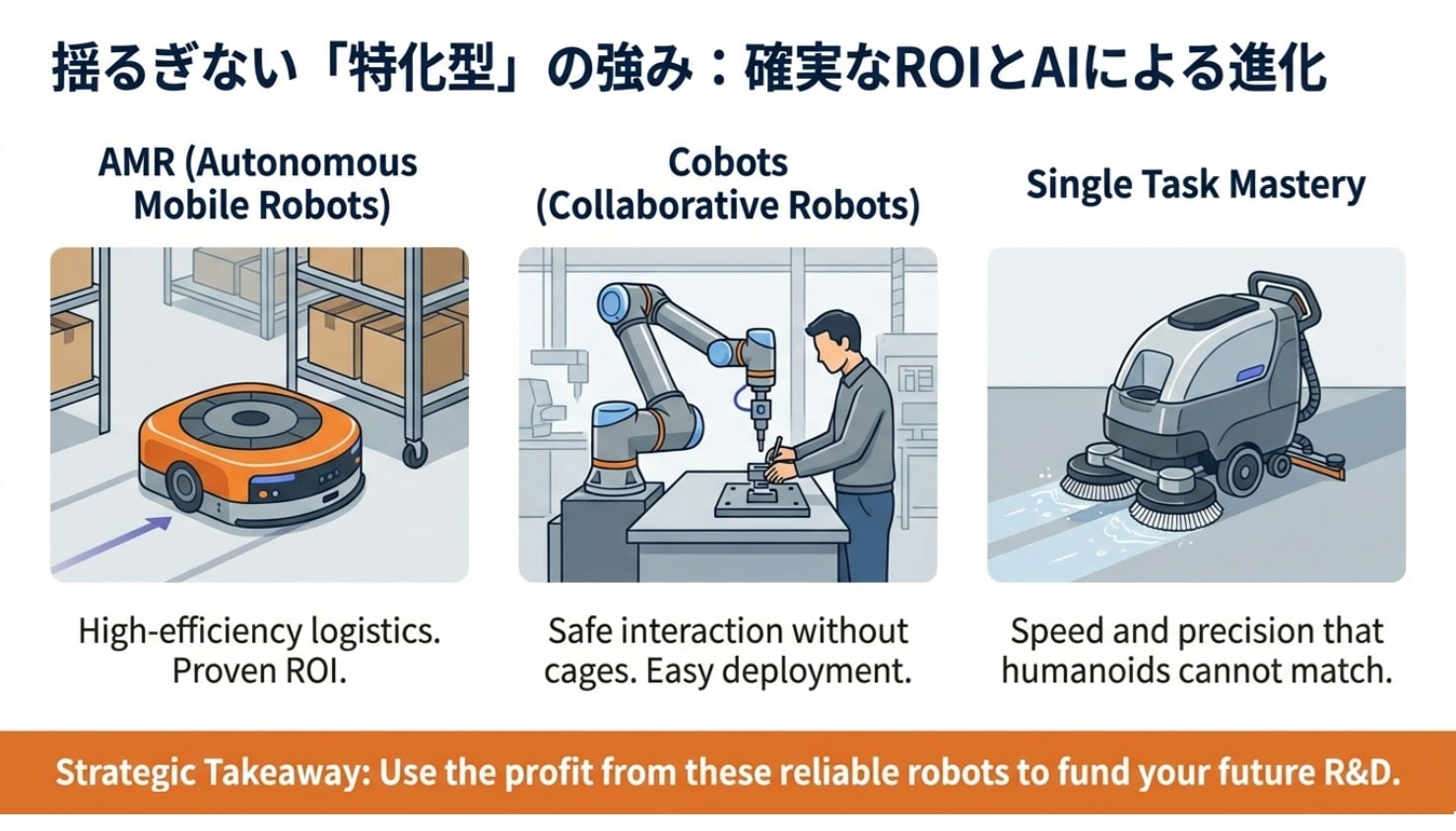
現実解:2026年3月時点でも“勝ち筋”は、まず特化型でROIを出し、その利益とデータで人型PoCを回すことです。
❶ 高効率・高精度
特定の作業に特化して設計されているため、その作業においては最高の効率と精度を発揮します。例えば、工場の組み立てラインで同じ作業を繰り返すロボットアームは、人間や汎用ロボットよりもはるかに高速かつ正確に作業できます。
❷ コスト効率
汎用性を持たせるための複雑な機構やセンサーが不要な場合が多く、開発・製造・運用コストを抑えられます。そのため、投資対効果(ROI)(Return On Investment:投資した資本に対して得られる利益の割合)が見積もりやすく、企業にとっては導入の意思決定がしやすいというメリットがあります。加えて、OSや身体の標準がまだ固まりきっていない段階では、まず特定工程で確実に資本を回収し、過大投資によるロックインを避けやすいという利点もあります。
❸ 信頼性・耐久性
一般的に構造がシンプルなため故障リスクが低く、安定した長時間稼働が可能です。過酷な環境(高温、粉塵など)での作業にも耐えうる設計がしやすいのも特徴です。
❹ 導入の容易さ
特定のプロセスを自動化するという目的が明確なため、既存の生産ラインやワークフローへの統合が比較的容易です。近年では、専門知識がなくても操作できるインターフェースを備えたロボットも増えています。
進化する特化型ロボット:AIとの融合による高度化
AI技術の導入により、特化型ロボットは従来のマニュアル操作や固定的なプログラム実行を超え、より高度で柔軟な能力を獲得しています。
国際ロボット展などの展示会でも、多様な産業向けの協働ロボットや、清掃・警備・食品現場向けのAI搭載特化型ロボットが多数出展されており、
「即導入可能」なモデルと実際のROIを具体的に示す事例が増えてきました。
❶ 物流・倉庫
Amazonの倉庫ロボット(Proteus, Sparrow)のように、AMR(Autonomous Mobile Robot:自律移動ロボット)(自ら経路を判断し移動できる搬送ロボット)が、AIによる高度なナビゲーション(経路探索・障害物回避)やピッキング(商品を取り出す作業)精度向上により、人間と協働しながら倉庫全体の効率化を推進しています。
❷ 協働ロボット(コボット)
人間と安全柵なしで同じ空間で作業できるコボット(Collaborative Robot)は、AIによる動作学習(人間の動きを学習して作業を覚える)や異常検知機能などを搭載し、より安全かつ柔軟に人間を支援できるようになりました。これにより、従来ロボット導入が難しかった中小企業や、食品・医薬品製造など多様な産業での導入が拡大しています。
❸ サービス・清掃
レストランの配膳ロボットや、空港・商業施設の大型清掃ロボットは、AIによる効率的なルート計画(最も効率の良い移動経路を計算)やリアルタイムでの障害物回避能力の向上により、人手不足解消やサービス品質の安定化に貢献しています。
❹ その他
建設現場では、AIが溶接箇所の状態を判断し最適な条件で作業を行う自動溶接ロボットが活用されています。
分野では、AI画像認識(カメラ映像からAIが対象物を識別・判断する技術)を活用し、熟した果実だけを選んで収穫するロボットなどが実用化されています。このように、各専門分野でAI搭載の特化型ロボットが活躍の場を広げています。
汎用型との共存・協調へ
今後は、汎用型と特化型がそれぞれの強みを活かして連携する「共存・協調モデル」が主流になると考えられます。例えば、工場では人型ロボットが複雑な組立を担当し、AGV/AMRが搬送を受け持つ。介護施設では人型が身体介助を、特化型が見守りや清掃を担うといった分業です。
タスクの性質やコストに応じて、最適なロボットを適材適所に配置する柔軟性が重要になります。
実務の着地:人型=複雑タスク、AMR/アーム=高速・高精度タスク、という“分業設計”が現場では最短距離です。
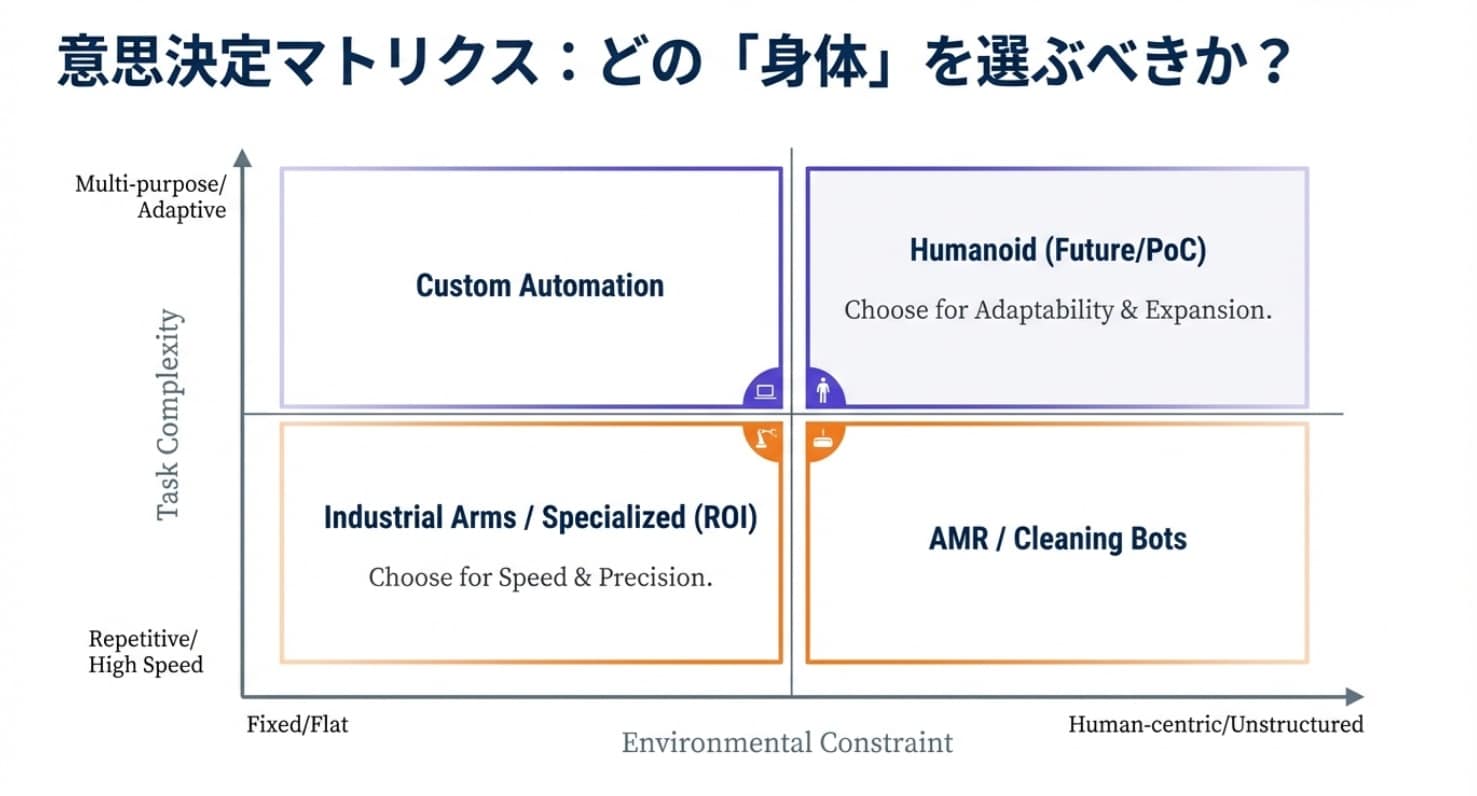
問うべき核心:「本当に人型が必要か?」- 形状と機能の最適化
形状と機能のトレードオフ
❶ 複雑性とコスト高
人間の模倣は機構を複雑にし、コスト、故障リスク、メンテナンス性を悪化させる。
❷ 効率の限界
特定作業では、その作業に特化した形状の方がはるかに高効率・高精度。
❸ 安定性とエネルギー効率
二足歩行は不安定でエネルギー効率も低い傾向がある。
判断軸:目的が「速度・精度・安全」なら特化形状が優先。「環境適応・拡張性」なら人型をPoCで検証。
導入目的に対して、人型であることが本当に必要か、他の形状では代替できないかを慎重に検討する必要があります。
用途別の最適解は多様
用途によっては、人型以外の形状が明らかに合理的です。以下の表は一例です。
| 用途 | 最適な形状(例) | 理由 |
| 製造ラインでの高速組立・溶接 | 産業用ロボットアーム | 特定の動作範囲で最高の速度、精度、剛性を発揮。連続稼働に特化。 |
| 倉庫内での棚搬送・ピッキング | AGV/AMR+ 専用ピッキング機構 | 効率的な移動(車輪)、重量物搬送、特定商品の高速・正確なピッキングに最適化。 |
| 家庭内の床掃除 | 円盤型・D字型ロボット掃除機 | 低重心で安定し、家具の下など狭い場所にも入り込める形状。吸引・拭き掃除機能に特化。 |
| 配管やダクト内の点検 | ヘビ型ロボット、小型走行ロボット | 人間の入れない狭隘な空間を移動し、内部を調査するのに適した形状。 |
| 災害現場での探索・救助 | クローラー型、多脚型、飛行ドローン、可変型ロボット | 不整地での高い走破性や空中からの偵察能力など、状況に応じた適応力が必要。 |
| 介護施設での見守り・コミュニケーション | 据え置き型センサー、卓上ロボット、アバター表示デバイス | 物理的な移動能力より、センサーによる検知や映像・音声での対話が重要な場合がある。 |
このように、「タスク」と「環境」に応じて最適なロボットの形態は異なります。将来的には、「必要な場所に、必要な時に、必要な機能を持ったロボットを」という、より柔軟で分散的なアプローチや、状況に応じて形態を変える設計思想が重要になる可能性があります。
まとめ:多様なロボットが共存する未来へ
人型ロボットは既存環境への適応性や汎用性に期待が集まりますが、万能ではなく、コストや効率の面では課題もあります。すべての場面で人型が最適とは限らず、用途に応じた特化型ロボットや、場合によっては人型以外の形状が合理的です。今後は、これらの多様なロボットがそれぞれの強みを活かし、適材適所で共存・協調していく社会が現実的な姿となるでしょう。
そして経営者や企画担当者が、いま本当に考えるべき問いは、
「人型と特化型、どちらを先に導入するか?」という二択だけではありません。
中長期で見れば、
OpenAI、NVIDIA、Tesla など、どのAIエコシステム(経済圏)の上に自社のロボットとデータを載せるのか
という選択が、競争力やロックインの度合い、データ活用戦略を大きく左右していきます。
2025〜2026年は、ロボットという「身体」を選ぶ時代であると同時に、その身体を動かすための「頭脳(OS)」をどの陣営に託すのかを決める分岐点のフェーズでもあります。
読後のアクション:①タスク分解→②特化型でROI→③人型PoC→④同時にOS/データ方針決定、の“並走”が最も失敗しにくい。
次の一手は、①現場タスクを分解して「特化型でROIが出る領域」を先に自動化し、②PoCで人型の適用可能性を検証し、③データ連携・開発基盤(OS/エコシステム)の方針を定める――この3点に、④OS/データ方針の並走を加えた4点を同時に進めることです。
よくある質問(FAQ)
Q1. 2026年に導入するなら「特化型」と「人型(ヒューマノイド)」どちらから始めるべき?
A1. 多くの企業にとっては、まず特化型ロボットから着手するのが現実的です。清掃・搬送・溶接など役割を絞ることで、導入コストと運用リスクを抑えやすく、既存事例も豊富だからです。一方、人型は将来性が高い反面、価格・安全性・運用体制など検証すべき要素が多いため、まずはPoC(限定実証)で知見を蓄えるのが堅実です。
Q2. 汎用型(人型)ロボットと特化型ロボットの主な違いは?
A2. 汎用型(人型)は、人間に近い身体で多様なタスクをこなすことを目指します。環境適応や拡張性が強みですが、コストや運用難易度が高くなりがちです。特化型は、特定作業に最適化されており、効率・コスト・信頼性の面で導入しやすい一方、できる作業は限定されます。
Q3. なぜ「人型」が注目されるの?車輪やアームではダメ?
A3. 人型が注目される最大の理由は、私たちの社会や設備が人間の身体に合わせて設計されているためです。人型であれば「既存環境をそのまま使える」可能性があり、将来的に環境改修コストを下げられます。ただし、すべてのタスクで人型が最適とは限らず、速度・精度・安全性が重要な現場では、アームやAMRなど非人型の方が合理的なケースも多いです。
Q4. 2026年時点で注目すべき最新人型ロボットは?
A4. 代表例として、Tesla Optimus、Figure 03(Helix 02 搭載)、CES 2026で量産版が公開されたAtlas、Digit、Walker S、Unitree G1などが挙げられます。共通する狙いは「人間向け環境で動ける汎用性」と、生成AI/基盤モデルを用いた後からのスキル拡張です。
Q5. 中小企業や地方工場でも、人型ロボット導入は現実的?
A5. 現時点では、人型を本格導入できるのは資本力のある企業が中心で、中小企業にとってはハードルが高いのが実情です。ただし、①特化型で単純作業を自動化してROIを確保し、②人手不足が深刻な工程から順にPoCを小さく回すという段階的アプローチなら現実的です。
Q6. 人型ロボットはいつ頃、身近な存在になる?
A6. 2025〜2026年は、工場・倉庫など産業用途での限定展開に加え、「実運用の実績」や「配備計画」が一次情報として積み上がり始めた局面です。たとえばFigure AIはBMWでの稼働実績とFigure 03評価フェーズへの移行を公表し、Boston DynamicsはAtlas量産版の公開と2026年生産分の配備計画を公式に述べています(いずれも企業発表であり、予定は変わり得ます)。一方、家庭普及にはコスト、安全性、家事能力など依然として大きな課題が残っており、まずは産業用途で実績とデータを積み上げた後、段階的に用途が広がるという見方が一般的です。
専門用語まとめ
- 汎用型ロボット
- 多様な環境で複数タスクを柔軟にこなすことを目指すロボット。代表例がヒューマノイド(人型)で、既存の人間向け設備を活かせる可能性がある一方、コストや安全・運用設計の難易度が高くなりやすい。
- 特化型ロボット
- 清掃・搬送・溶接・ピッキングなど、特定作業に最適化されたロボット。役割が明確なため導入判断(ROI算定)がしやすく、安定稼働・保守性の面でも現実解になりやすい。人型導入前の足場としても有効。
- ヒューマノイドロボット
- 人間の姿や構造(四肢・二足歩行など)を模倣したロボット。人間向けに設計された空間・道具を使える可能性があり将来性は大きいが、機構が複雑で高コストになりやすく、安全性・運用体制の整備も重要になる。
- AI基盤モデル
- 大量データで事前学習された汎用AIモデル。ロボットにおいては、認識(見える化)・理解(意味づけ)・計画(次に何をするか)・学習(技能の獲得)を支える土台となり、後からタスクを拡張する“頭脳の共通基盤”になる。
- VLM(視覚言語モデル)
- 画像(視覚)と言語を統合して理解・生成できるモデル。ロボットが周囲を「見て理解する」ための中核で、状況説明や指示理解、作業計画の手がかりを提供する。マルチモーダル化が進むほど、汎用タスクへの適用範囲が広がる。
- ロボットOS/プラットフォーム
- ロボットの開発・運用を支える基盤の総称(ミドルウェア、シミュレータ、学習環境、API、ツール群など)。どの陣営(OpenAI・NVIDIA・Tesla等)のエコシステムに載るかで、拡張性・データ連携・ロックイン度合いが大きく変わる。
- ROS 2
- ロボット開発で広く使われるOSSミドルウェア。センサー、制御、通信など“神経系”を担い、さまざまなロボットやツールと連携できる。特定ベンダーに依存しにくく、既存資産の再利用や周辺エコシステムの豊富さが強み。
- PoC(概念実証)
- 小規模に試して効果・課題・運用条件を検証する導入ステップ。人型ロボットは特に、現場安全・作業成功率・保守体制・人との協働設計など不確実性が大きいため、限定実証で知見を貯めて段階的に拡張するのが堅実。
- ROI
- 投資対効果(Return On Investment)。自動化で得られる効果(省人化、品質安定、稼働率向上、事故リスク低減など)を投資額と比較して評価する。特化型ロボットは効果が見積もりやすく、導入判断の初手になりやすい。
- AMR
- 自律移動ロボット(Autonomous Mobile Robot)。倉庫・工場での搬送や構内物流で普及が進み、経路計画や障害物回避などを自律的に行う。人型より先にROIが出やすい領域が多く、現場自動化の実装フェーズで重要な選択肢。
主な参考サイト
- Tesla AI(閲覧)
- Figure AI(BMW運用実績・公式)
- Boston Dynamics(CES 2026発表・公式)
- Boston Dynamics × NVIDIA(公式)
- Agility Robotics 公式サイト
- Unitree Robotics 公式サイト
- Unitree公式ショップ(価格)
あわせて読みたい
更新履歴
- 初版公開
- VLM/OS覇権戦争の視点を追加し全面改稿。最新情報(Figure, Tesla等)を反映。
- 2026年2月5時点最新動向を反映(Boston Dynamics CES 2026公式発表、Figure AI BMW稼働実績の公式発表、Unitree公式ショップ価格の反映、VLM/OS表の名称統一)。
- 2026年3月時点の最新動向を反映(Figure 03評価フェーズ、Helix / Helix 02反映、Atlasの配備計画表現と時点表記を更新)。
以上








