


AI×ロボット革命の核心技術とは?脳・身体・エネルギーで読む未来展望【2026年版】
AIロボットは、単にAIモデルが賢いだけでは成立しません。現実世界で動くためには、知能を担うAI・半導体、物理世界で動く身体、長時間稼働を支えるエネルギーが一体で進化する必要があります。この記事では、AIロボットを成立させる核心技術を「脳・身体・エネルギー」の3軸で体系的に整理します。
✅ この記事の結論
- 核心は3つ:AIロボットの競争力は、脳・身体・エネルギーをどう統合するかで決まります。
- 知能の中身:基盤モデル、推論チップ、エッジAIの進化が、ロボットの自律性と答性を押し上げています。
- この記事の役割:本記事はロボット系クラスターにおける技術ハブとして、「脳・身体・エネルギー」それぞれの技術トレンドを一枚で俯瞰し、事業戦略や投資判断の前提地図を提供することを狙っています。入口・実装・事例は関連記事で補完できます。
この記事の著者・監修者 ケニー狩野(Kenny Kano)

フィジカルAIシリーズにおける本記事の位置づけ
フィジカルAIを体系的に理解するには、全体像から各専門領域まで、1つの流れとして捉える必要があります。本記事は、「脳・身体・エネルギーの技術解説」を扱います。
- フィジカルAIとは? = シリーズ全体の地図・本質と仕組み
- 生成AIロボット革命 = 知能を持つパートナーへの質的変化
- 日本の処方箋 = 社会課題解決への応用
- ビジネス最前線:最新ロボ5選 = 今、現場で動くロボットの具体像
- フィジカルAI元年2026 = 2026年の全体動向と経営判断
- 核心技術3選 = 脳・身体・エネルギーの技術解説(本記事)
AIロボット実現の鍵を握る基盤技術
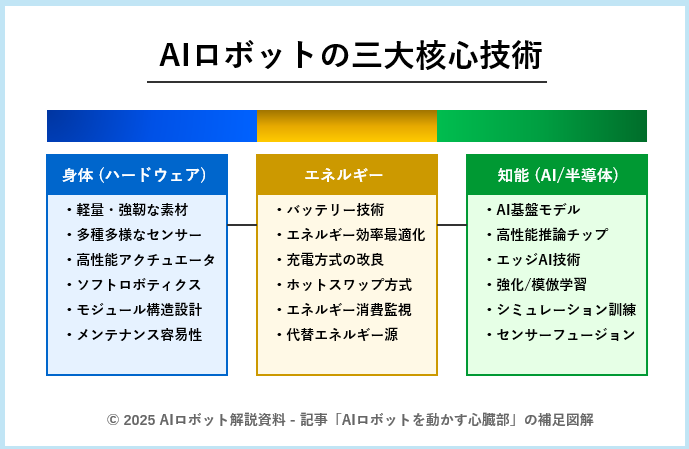
AIロボットは、知能だけでは成立しません。「脳・身体・エネルギー」が同時に揃ってはじめて、現実世界で使える存在になります。
AIロボットが人間のように活動するためには、単に高度なAI(知能)があれば良いわけではありません。現実の物理世界で活動するための「ハードウェア(身体)」と、長時間稼働を可能にする「エネルギー供給」、そして高度な「AI半導体、特に推論チップ」が三位一体となって機能することが不可欠です。
ここでは、AIロボットを支えるこれらの基盤技術の現状と課題を見ていきます。
主要用語解説
- アクチュエータ: ロボットの関節などを動かすための駆動装置(モーターなど)。
- センサーフュージョン: 複数のセンサーからの情報を統合し、より正確で信頼性の高い認識を行う技術。
- 運動制御: ロボットが意図した通りに、安定かつ正確に動くように制御する技術。
- AI基盤モデル: 大量データで事前学習された汎用AIモデル。ロボットの汎用性向上に貢献。
- 推論チップ: 学習済みAIモデルの実行(推論)に特化した半導体。
- エッジAI: クラウドではなく端末上でAI処理を行う技術。
- ロボットハンド: 人間の手に相当するロボットの部位。物を掴んだり操作したりする。
- SLAM (Simultaneous Localization and Mapping): 自己位置推定と環境地図作成を同時に行う技術。ロボットの自律移動に不可欠。
1. AIロボットの「脳」:AI技術と専用半導体の最新動向
ロボットの知能は、基盤モデル・推論チップ・エッジAIの三層で進化しています。
ロボットが自律的に状況を判断し、人間のように柔軟に行動するためには、高度な「知能」が不可欠です。生成AIによってロボットが何から変わり始めたのかを先に整理したい方は、生成AIロボット革命:フィジカルAIは「真のパートナー」へ進化するを先に読むと、この章の理解がスムーズになります。
1-1. AIの変革的影響:基盤モデルが変えるロボットの知能
❶ 基盤モデル (Foundation Models) の応用
大量のテキスト、画像、動画などで事前学習された大規模AIモデル(GPTシリーズのようなLLM: 大規模言語モデル、画像とテキストを扱うVLM: 視覚言語モデルなど)が、ロボットの「知能」向上に革命をもたらしつつあります。
- 自然言語による指示理解(例:「テーブルの上にある赤いリンゴを取ってきて」)
- 視覚情報からの高度な状況理解と推論(例:画像を見て「ドアが開いているから通れる」と判断)
- 複雑なタスクの計画立案(例:「コーヒーを淹れる」という指示から、豆を挽く→フィルターをセット→お湯を沸かす…といった一連の手順を生成)
これにより、従来必要だったタスクごとの専用プログラム開発の手間が大幅に削減され、より汎用的な能力を持つロボットの実現が期待されています。現在は、RT-2に始まるGoogle DeepMindのRTシリーズに加え、2025年に発表されたGemini Robotics / Gemini Robotics-ERが、ロボット向け基盤モデルの新たな代表格として注目されています。これらはGemini 2.0世代のマルチモーダル能力をベースに、「認識・推論・行動出力」をより強く統合する流れを示しています。加えて、NVIDIAのIsaac GR00T系や、Figure AIが2025年に発表したHelixも代表例です。なお、Figure AIはOpenAIとの協業終了後、自社AI開発へ軸足を移しています。
❷ 学習パラダイム (RL/IL) の深化
- 強化学習 (RL): 試行錯誤を通じて最適な行動を獲得。特にシミュレーション環境での活用が進み、歩行やマニピュレーションスキルの高度化に貢献。報酬設計や実世界への応用が課題。
- 模倣学習 (IL): 人間の動作(デモンストレーション)を模倣してスキルを高速に学習。特に複雑な手作業のティーチングに有効。質の高い多様なデモデータの収集が鍵。
- 組み合わせと進化: ILで初期動作を学習しRLで最適化する、人間のフィードバックを取り入れる、といったハイブリッドな学習手法や、より効率的な学習アルゴリズムの開発が進められています。
❸ シミュレーション技術の重要性
AIモデル、特にRLの訓練には膨大な試行錯誤が必要ですが、実機での試行は非効率かつ危険です。そのため、物理エンジンを用いて現実世界を忠実に再現した仮想環境(シミュレーター)でAIを訓練することが不可欠になっています。
NVIDIAのIsaac Sim/Lab、Unity、MuJoCoなどが広く利用されています。シミュレーション上で大量に生成したデータ(合成データ)は、実世界データの不足を補うためにも重要です。ただし、シミュレーションと実世界の物理的な差異(Sim-to-Realギャップ)を克服し、シミュレーターで学習したAIを実機で確実に動作させるための技術(ドメインランダム化など)が依然として重要な研究課題です。このテーマをさらに深掘りしたい方は、Physical AIの核心はなぜsim-real loopにあるのかや、次世代身体性AIロボットの開発と制御も参考になります。
Isaac Sim/Labとは、NVIDIA Omniverse上のロボット専用シム。GPU並列計算で現実的な接触・光学を高速再現し、大量のドメインランダム化やRL学習を一気に回せる産業向けフラッグシップ。
Unity Roboticsとは、ゲームエンジンUnityにURDF/ROS2支援を加えた開発環境。高機能レンダリングと物理を統合し、C#/PythonスクリプトでLidar・カメラ付きロボのプロトタイプを素早く試せる。
MuJoCoとは、DeepMindがOSS化した軽量高精度物理エンジン。剛体・関節・接触計算が極めて速く、RL研究の定番ベンチマークに採用。Python APIで手軽に制御実験を回せる。
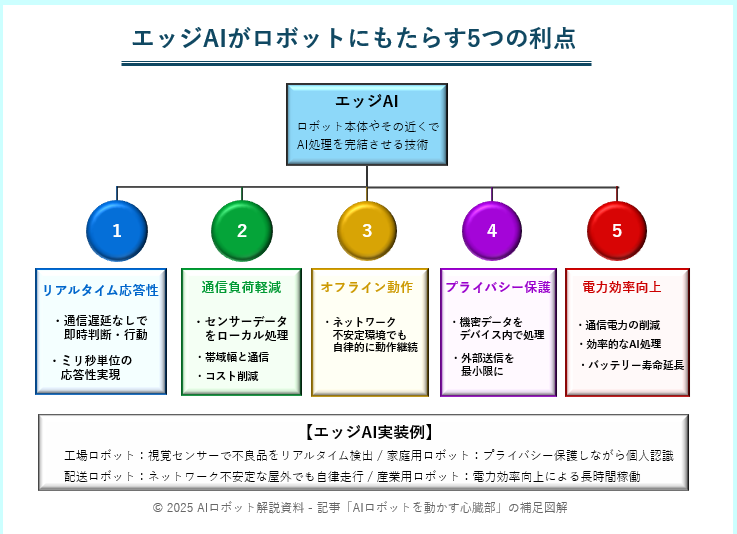
1-2. エッジAI:ロボットの自律性を加速する5つの技術
ロボット本体やその近くのデバイス(エッジ)でAI処理を完結させる「エッジAI」技術は、ロボットの自律性と実用性を高める上で極めて重要です。
❶ リアルタイム応答性の確保
クラウドとの通信には必ず遅延(レイテンシ)が発生します。エッジAIではこの遅延がないため、ロボットはセンサーで捉えた情報に基づいて瞬時に判断し行動できます。これは、高速で動く物体への対応、精密な作業、人間との安全なインタラクション、衝突回避など、ミリ秒単位の応答速度が求められるタスクには不可欠です。
❷ 通信負荷の軽減とコスト削減
ロボットが搭載する多数のセンサー(特にカメラ)は大量のデータを生成します。これをすべてクラウドに送信すると、ネットワーク帯域を圧迫し、通信コストも増大します。エッジAIで必要な情報だけを抽出・処理し、結果のみをクラウドに送ることで、これらの問題を軽減できます。
❸ オフライン環境での動作継続性
工場内、屋外、災害現場など、ネットワーク接続が不安定だったり利用できなかったりする環境でも、エッジAIを搭載したロボットは自律的に判断し、動作を継続することができます。これはロボットの活動範囲と信頼性を大きく広げます。
❹ プライバシーとセキュリティの向上
カメラ映像や音声データなど、個人のプライバシーに関わる可能性のある機密性の高い情報を、デバイス内部やローカルネットワーク内で処理・完結させることができます。データを外部のクラウドに送信する必要がないため、情報漏洩や不正アクセスのリスクを低減できます。
❺ 電力効率の最適化
通信に必要な電力を削減できるほか、タスクに応じて必要なAI処理だけを効率的にエッジデバイス上で実行することで、ロボット全体の消費電力を最適化し、バッテリー駆動時間の延長に貢献します。
例えば、工場ではエッジAIを搭載した産業用ロボットが製品欠陥を即時検査し、作業員を認識して安全に協働できます。家庭用ロボットもプライバシーを守りつつ生活や嗜好に合ったサービスを提供でき、進化した推論チップが自律性と実用性を一段と高め、バッテリー駆動時間も延ばします。また通信負荷が減るため消費電力全体が最適化されます。さらに2025年以降は、Gemini Robotics On-Deviceのように、ロボット側で直接モデルを走らせるローカル実行型ロボティクスAIも登場しており、「クラウド前提」だったロボット知能アーキテクチャが、エッジ中心へ広がりつつあります。
1-3. 推論チップ:ロボット用AI半導体の最新動向
学習済みの複雑なAIモデル(特に基盤モデル)を使って、センサー情報からリアルタイムに状況判断や行動決定を行う「推論 (Inference)」処理は、ロボットの応答性や自律性に直結します。この推論処理を、ロボット本体のような電力やサイズの制約がある環境で、高速かつ低消費電力で実行するための専用半導体(推論チップ、AIアクセラレータ)の開発競争が激化しています。
❶ NVIDIA (アメリカ) [NVIDIA 公式サイト]
- 主要製品/アーキテクチャ: Blackwellアーキテクチャ、GH200 Grace Hopper Superchip、Jetsonファミリー(Jetson AGX Orin, Jetson Orin Nano, Jetson Thor)
- 特徴: GPU技術による圧倒的な並列処理能力。データセンターからエッジまでカバー。強力なソフトウェアエコシステム(CUDA、TensorRT)。ロボティクス向け垂直統合(Isaac, GR00T連携)。
- ロードマップ(2026年3月時点): データセンター向け: Blackwell Ultra(2025年後半), Rubin(2026年), Rubin Ultra(2027年)。エッジ向け: Jetson Thor(2025年8月に一般提供開始。Agility Robotics・Amazon Robotics・Boston Dynamics・Figure・Metaなど主要ロボティクス企業が早期採用)。
❷ SiMa.ai (アメリカ) [SiMa.ai 公式サイト]
- 主要製品: MLSoC (Machine Learning System-on-Chip)、Modalixファミリー
- 特徴: 組込みエッジ向け高電力効率 (TOPS/W)。ソフトウェア中心アプローチ。
- ロードマップ(2025年時点): 第2世代MLSoC (25年Q1)。
❸ Hailo Technologies (イスラエル) [Hailo Technologies 公式サイト]
- 主要製品: Hailo-8、Hailo-15 (Vision Processor)
- 特徴: エッジデバイス向け高性能・低消費電力。独自データフローアーキテクチャ。
- ロードマップ(2025年時点): 特定市場(産業、セキュリティ、自動車、ロボティクス)向け製品拡充。
❹ Untether AI (カナダ) [Untether AI 公式サイト]
- 主要製品: speedAIファミリー (例: speedAI240 Slim)
- 特徴: at-memory computationによるメモリ効率と高性能・高電力効率。
- ロードマップ(2025年時点): エッジからクラウドまで対応する製品拡充。
❺ EdgeCortix (日本) [EdgeCortix 公式サイト]
- 主要製品: Sakura-Iチップ、ソフトウェアIP
- 特徴: ソフトウェア定義の「再構成可能アクセラレータ」搭載。電力効率と柔軟性。
- ロードマップ(2025年時点): 独自エッジAIチップとIP開発継続。
❻ AWS (Amazon / アメリカ) [AWS AI 公式サイト]
- 主要製品: Inferentia (推論用), Trainium (学習用)
- 特徴: AWSクラウドサービスとの統合に最適化。カスタムAIチップ。
- ロードマップ(2025年時点): Inferentia2 (性能目標: 4倍スループット, 10倍低レイテンシー), Trainium2開発。
| 企業/製品 | 主な特徴 | 主な用途 | 強み |
| NVIDIA (Jetson Thor) | ・GPUベースの並列処理 ・強力なソフトウェアエコシステム ・垂直統合開発環境 | ・自律移動ロボット ・複雑な視覚処理 ・AIロボット全般 | ・高性能 ・包括的なツール群 ・エコシステムの充実 |
| SiMa.ai (MLSoC) | ・高電力効率 ・ソフトウェア中心設計 ・汎用性と特化性の両立 | ・バッテリー駆動ロボット ・エッジデバイス ・小型自律ロボット | ・低消費電力 ・小型・軽量 ・長時間稼働 |
| Hailo (Hailo-15) | ・独自データフローアーキテクチャ ・エッジAI特化 ・組込みシステム向け | ・産業用ロボット ・監視・検査ロボット ・協働ロボット | ・高エネルギー効率 ・リアルタイム処理 ・小型設計 |
| Untether AI (speedAI) | ・at-memory computation ・メモリ効率最適化 ・データフロー型アーキテクチャ | ・データ集約型アプリケーション ・大規模センサー処理 ・高次元データ解析 | ・高メモリ効率 ・スケーラブル ・高スループット |
| EdgeCortix (Sakura-I) | ・再構成可能アクセラレータ ・ソフトウェア定義 ・動的最適化 | ・多様なワークロード ・エッジAI処理 ・変化する要件への対応 | ・柔軟性 ・電力効率 ・モデル適応性 |
これら多様な推論チップの登場と進化により、ロボットはより複雑で高性能なAIモデルをリアルタイムで実行できるようになり、その「知能」レベルは格段に向上しています。一方で事業戦略としては、「NVIDIAの垂直統合エコシステム(CUDA・Isaac・GR00T)に乗るか」「SiMa.aiやHailoのような電力効率特化チップで差別化するか」というプラットフォーム選択そのものが、プロダクト戦略・調達戦略の中核テーマになりつつあります。
“` 以下、**Part 2 / 2** です。 “`html
2. AIロボットの「身体」:高性能ハードウェア技術の進化
AIロボットの身体は、軽さ・強さ・柔らかさ・精密制御を同時に満たす方向へ進化しています。
ロボットが物理世界で機能するための「身体」、すなわちハードウェアは、より軽く、強く、しなやかで、そして環境を正確に認識できる能力が求められます。
2-1. 軽量化、柔軟性、耐久性の追求
❶ 軽量化と強度
機敏な動きとペイロード(可搬重量)確保のため、炭素繊維強化プラスチック(CFRP)やチタン合金などの先端材料が活用されています。軽量化はエネルギー効率向上にも繋がります。
❷ 柔軟性と安全性(ソフトロボティクス)
人間との接触時の安全性を高めるため、空気圧や柔軟な素材を用いたソフトロボティクス技術や、ソフトな外装材(1X NEOなど)が注目されています。物体を優しく把持したり、衝撃を吸収したりする能力を高めます。
❸ 耐久性とメンテナンス性
実用環境での長期稼働には、高い耐久性と容易なメンテナンス性が不可欠です。自己修復材料、耐衝撃設計、故障予測技術、モジュール構造による部品交換の容易化などが研究・開発されています。
2-2. 環境認識を高めるセンサー技術
人間のように多様な情報を得るため、複数のセンサーを組み合わせるのが一般的です。

❶ マルチモーダルセンシングの標準化
ロボットが複雑な環境で的確に活動するには、人間のように多様な感覚情報を統合するマルチモーダルセンシングが不可欠であり、その標準化が進んでいます。
- 視覚では、高解像度カメラや深度情報を得るRGBDセンサー、360度カメラ、そしてLiDAR(光を用いた距離計測)が中核です。LiDARは小型・低コスト化により搭載が進み、ナビゲーションや物体認識、環境地図作成(SLAM)の基盤技術となっています。
- 触覚・力覚センサーは、物体の硬さや形状、表面状態、加える力を精密に捉え、特にロボットハンドの指先や関節に搭載されて繊細な手作業を可能にします。皮膚のような柔軟なセンサー開発も活発です。
バランス用のIMU、音声対話用マイク、近距離障害物検知用センサーなど、多種多様なセンサーからの情報を組み合わせることで、単一センサーの限界を超えた、よりロバストで高精度な環境認識が実現されます。
❷ センサーフュージョンの重要性
これら多種多様なセンサーから得られる断片的な情報を統合し、相互に補完することで、単一センサーの弱点(例:カメラは暗闇に弱い、LiDARは透明な物体を検知しにくい)を克服し、より正確で信頼性の高い(ロバストな)環境認識を実現します。AI技術、特に深層学習はセンサーフュージョンの高度化にも貢献しています。
センサーフュージョンとは、複数のセンサーから得られる情報を統合し相互に補完することで、単一センサーの弱点を克服する技術です。これにより、より正確で信頼性の高い環境認識を実現します。AI技術もその高度化に貢献しています。
2-3. 動きを生み出すアクチュエータ技術
❶ 高性能化への要求
人間のような滑らかで力強く、かつ精密で応答性の高い動きを実現するには、アクチュエータ(駆動装置)の性能が鍵となります。小型・高出力・高効率な電気モーターが主流ですが、用途に応じて油圧や空気圧も用いられます。人工筋肉のような新しい駆動原理の研究も進められています。
❷ 精密制御のための要素技術
モーターの高速回転を適切な速度とトルクに変換する精密減速機(ハーモニック・ドライブ・システムズの波動歯車装置などが有名)や、力の伝達ロスやバックラッシ(機構の遊び)を最小限に抑える設計が重要です。
❸ インテグレーションとカスタム化
TeslaやApptronikのように、モーター、減速機、センサー、制御基板などをコンパクトに一体化した「スマートアクチュエータ」やカスタム設計のアクチュエータを開発し、ロボット全体の性能、サイズ、重量を最適化する動きが加速しています。Boston Dynamicsが油圧式から高効率な電動式へ移行したことも、このトレンドを象徴しています。
2-4. 複雑な「運動制御」:人間のような動きの実現
二本足で不安定なバランスを取りながら歩き、階段をスムーズに上り下りし、ドアノブを回して扉を開け、繊細な力加減で物をつかむ――これら人間には容易な動作も、ロボットにとっては非常に高度な制御技術の結晶です。こうした能力が現実の製品でどこまで表れているのかを知りたい方は、フィジカルAIのビジネス最前線:常識を覆す最新ロボット5選を併読すると理解しやすくなります。
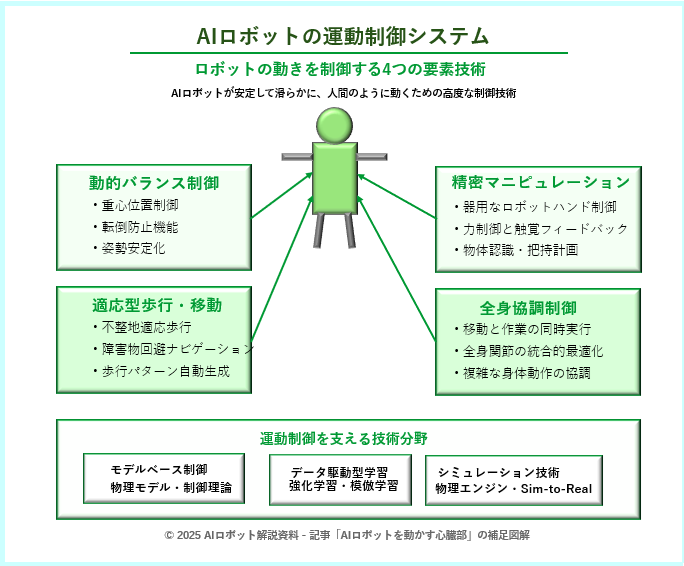
❶ 動的バランス制御 (Dynamic Balance Control)
二足歩行ロボットが転倒せず安定して移動・作業するための根幹技術です。センサー情報から重心位置や床からの反発力をリアルタイムで計算し、1000分の1秒単位で全身の関節角度を微調整し続けます。物理モデルに基づく予測制御や、AI(強化学習)によるデータ駆動型の制御が用いられ、これにより人間のような自然なバランス維持を目指します。Boston Dynamics社のAtlasがこの分野で高い能力を示しています。
❷ 適応型歩行・移動 (Adaptive Locomotion)
平坦な床だけでなく、凹凸のある不整地、段差、階段、坂道など、現実世界の多様な環境を認識し、それに応じて自律的に移動する能力です。視覚センサー(カメラ、LiDAR)で前方の環境を捉え、リアルタイムに歩幅、歩調、足の接地方法、関節の力の入れ具合などを自動調整します。これにより、様々な路面状況に対応したスムーズで安定した歩行を実現し、複雑な環境での活動を可能にします。
❸ 精密マニピュレーション (Dexterous Manipulation)
人間の手のように、様々な形状・硬さ・重さの物体を認識し、適切な力と動きで掴み、運び、道具を使いこなす能力です。多くの関節を持つ器用なロボットハンドと、視覚センサーや触覚・力覚センサーからの情報を利用した高度な制御アルゴリズム(力制御など)が不可欠です。近年はAI、特に模倣学習や強化学習を用いて、従来困難だった複雑な手作業(例:布を柔軟に扱う、ケーブル接続)をロボットに学習させる研究が目覚ましく進んでいます。
➍ 全身協調制御 (Whole-Body Control)
手足を別々に動かすのではなく、歩きながら物を運ぶなど複数のタスクを同時に、全身の動きを調和させて滑らかに効率よく行う制御技術です。全身の物理法則に基づき、多数の関節の動きや地面との力などを統合的に最適化計算します。AIと従来制御の融合で、より人間らしく複雑な動作や環境適応能力が高いロボットを目指し進化中です。
3. AIロボットの「エネルギー」:バッテリー技術の課題と解決策
AIロボットの実用化を制約する最大の要因の一つは、長時間稼働を支えるエネルギー供給です。
現在のロボット、特に自律移動や長時間稼働が求められる人型ロボットなどにとって、活動時間を制限する最大の要因がエネルギー供給、すなわちバッテリー技術です。

3-1. バッテリー性能の限界と次世代技術
現在主流のリチウムイオン電池では、エネルギー密度や安全性、寿命でロボットの要求を満たせず、特にヒューマノイドの長時間連続稼働は実用化の大きな障壁です。TeslaやFigureを含む多くのヒューマノイドでは、現時点でも連続稼働時間に制約があります。旧油圧式Atlasは約60〜90分規模と見られていましたが、2026年1月のCESで発表された商用電動版Atlasでは、公式発表値として4時間の稼働と、3分未満の自律バッテリー交換による実質連続運用が示されました。それでも多くのヒューマノイドは産業用途で一般的な「8時間シフト」には依然届いておらず、全固体電池やリチウム金属電池など次世代セルの研究開発が世界中で加速しています。
研究段階ではリチウムイオン比で大幅なエネルギー密度向上が示されており、特定用途向けの限定採用も始まりつつありますが、量産・コスト面での課題はなお残ります。大手メーカーもロボット向け専用セルの開発に注力しており、実用化に向けた期待が高まっています。
3-2. エネルギー効率の徹底追求
バッテリー性能向上と同時に、ロボット自身の消費電力をいかに抑えるかが極めて重要です。これには、低消費電力なプロセッサやモーター等の部品選定、軽量な機体設計といったハードウェア面の工夫が必要です。またソフトウェア面では、効率的なモーター制御、待機電力の削減に加え、AIを活用した動作計画の最適化(例:最短経路での移動、無駄な動きの排除)といった地道な取り組みが、長時間稼働の実現に不可欠となります。
3-3. 充電方法の進化と代替エネルギー
運用面では、手間を省くワイヤレス充電技術や、ロボットが自ら充電する自動ドッキング・充電システムが実用化しつつあります。また、バッテリーパック自体を迅速に交換する「ホットスワップ」方式も連続稼働に有効です。特殊用途向けには小型原子力電池や燃料電池も研究されていますが、課題が多く限定的です。ロボットが電源の制約から解放されるには、バッテリー技術の革新、エネルギー効率改善、運用インフラ整備という多角的な取り組みが不可欠です。
まとめ:技術の融合が拓くAIロボットの未来と私たちの生活への影響
AIロボットの未来は、脳・身体・エネルギーをどう統合するかにかかっています。
AIロボットの驚異的な進化は、ハードウェア(身体)、AI/半導体(知能)、そしてエネルギーという本記事で解説した三大核心技術が相互に連携し、発展してきた結果です。特に運動制御技術は、これらの技術を統合し実世界での活動を可能にする重要な橋渡し役となっています。
特にAI関連技術の進歩は、ロボットに人間のような認識・判断・学習能力を与え、その可能性を大きく広げています。推論チップの進化とエッジAIの普及は、ロボットの「脳」をより賢く、より速くしています。一方で、エネルギー供給のように、実用化に向けた大きな技術的ハードルも依然として存在します。これらの技術が今後どのように進化し、課題を克服していくかが、AIロボットが私たちの社会に広く普及し、活躍する未来を実現するための鍵となります。
ここから先は、関心に応じて入口・実装・事例へ読み進めると理解が深まります。 生成AIでロボットが何から変わったかを入口から整理したい方は生成AIロボット革命:フィジカルAIは「真のパートナー」へ進化するへ、実装や制御を深掘りしたい方は次世代身体性AIロボットの開発と制御へ、現実のロボット事例を見たい方はフィジカルAIのビジネス最前線:常識を覆す最新ロボット5選へ進んでください。
よくある質問(FAQ)
Q1. AIロボットの「身体」を構成する上で重要なハードウェア技術は何ですか?
A1. 軽量で高強度な素材、多様なセンサー、高性能なアクチュエータが特に重要です。
- 炭素繊維強化プラスチックやチタン合金などの先端材料が軽量化と強度を両立します。
- LiDAR、RGBDカメラ、触覚センサーなどが環境認識の精度を支えます。
関連:AIロボットの「身体」へ
Q2. なぜロボットにとってエネルギー供給が大きな課題とされているのですか?
A2. 現在主流の電池では、長時間の連続稼働を実現するためのエネルギー密度や急速充電性能に限界があるためです。
- そのため、次世代バッテリー技術の開発や、ロボット自体のエネルギー効率向上が急務です。
Q3. AIロボットの「知能」は、具体的にどのように進化しているのですか?
A3. 基盤モデル、推論チップ、エッジAIの進化によって、自然言語理解・視覚認識・計画立案の能力が大きく向上しています。
- ロボットが自然言語での指示を理解したり、複雑なタスクを計画したりする能力が高まっています。
- 高性能なAIをロボット上で動かす推論チップとエッジAIの進化が、その土台を支えています。
関連:AIロボットの「脳」へ
Q4. 「推論チップ」とは何で、ロボットにとってなぜ重要なのですか?
A4. 推論チップとは、学習済みのAIモデルを実行することに特化した半導体で、ロボットの応答性と自律性を支える重要な部品です。
- ロボットがリアルタイムに状況判断し、迅速に行動するために不可欠です。
- 特に電力やサイズに制約のあるロボット上で高性能AIを実現するために重要です。
関連:推論チップへ
Q5. AIロボットを理解するうえで、最初に読むべき関連ページはどれですか?
A5. 入口理解なら「生成AIロボット革命」、実装理解なら「次世代身体性AIロボットの開発と制御」、事例理解なら「最新ロボット5選」が最も相性が良いです。
- 本記事は技術全体を俯瞰するハブなので、そこから関心別に深掘りする設計が最適です。
関連:あわせて読みたいへ
参考サイト・出典
一次情報
- Google DeepMind – RT-2: New model translates vision and language into action
- Google DeepMind – Gemini Robotics brings AI into the physical world
- Google DeepMind – Gemini Robotics On-Device
- NVIDIA – Physical AI with World Foundation Models | NVIDIA Cosmos
- NVIDIA Newsroom – NVIDIA Announces Isaac GR00T N1
- NVIDIA Newsroom – Jetson Thor Now Available
- Figure AI – Helix
- 1X – NEO
- 1X – Meet Neo, your new home humanoid helper
- Boston Dynamics – Enterprise Robotics Redefined
二次情報
あわせて読みたい
更新履歴
- 2025年5月:初版公開。
- 2026年3月14日:Gemini Robotics / On-Device、Jetson Thor、1X NEO、Atlas、次世代バッテリー表現を最新化。
以上








