※本記事は継続的に最新情報へアップデートしています。
トヨタとTPSに学ぶAIロボットの学習ループ|現場改善をAI時代へ翻訳する
AIロボット導入で本当に差がつくのは、モデルの賢さだけではありません。 現場を観察し、動線を整え、異常を見える化し、失敗を次の改善へ戻す――その学習ループをどう設計するかが成否を分けます。本記事では、トヨタ記念病院のPotaro運用とTRIの研究を手がかりに、TPSの現場改善原理をAIロボット時代へどう翻訳できるかを整理します。
✅ この記事の結論
- ポイント1:ロボット導入の成否は機体性能だけでなく、動線再設計・標準化・多台数でも止まらない運用で決まります。
- ポイント2:TRIのDiffusion PolicyやLBMは、ロボット開発の主戦場をコード中心からデータ中心の学習ループへ移しています。
- ポイント3:AIロボット時代に重要なのは、賢く動くことだけでなく、異常を検知して止まり、失敗を次の改善へ戻せる仕組みです。
この記事の著者・監修者 ケニー狩野(Kenny Kano)

🚀本記事はPhysical AIの工場実装・運用5部作の第4部です。なお、本記事はロボット系クラスターの中では「現場改善の原理をAIロボット時代へ翻訳する実例記事」の役割を担います。工場OSの全体像を先に押さえたい方は第1部:産業用ロボット2.0とは?Physical AI時代の工場OS選定(2026)、Sim↔Realの戦略を俯瞰したい方は第2部:データが知能を育てる。Physical AI 2026:仮想と現実の双方向ループ、閉ループの実装設計を整理したい方は第3部:AIロボット×デジタルツインで自己改善!フィードバックループ完全解説、開発基盤まで広げたい方は第5部:Vera Rubin時代のAIチップとロボティクス開発ループもあわせてご覧ください。
- 👉 第1部:産業用ロボット2.0とは?Physical AI時代の工場OS選定(2026)
- 👉 第2部:データが知能を育てる。Physical AI 2026:仮想と現実の双方向ループ
- 👉 第3部:AIロボット×デジタルツインで自己改善!フィードバックループ完全解説
- 👉 現在の記事:第4部:トヨタとTPSに学ぶAIロボットの学習ループ
- 👉 第5部:Vera Rubin時代のAIチップとロボティクス開発ループ
トヨタのロボティクス戦略をどう読むか

本記事の主役はトヨタそのものではなく、TPSが持つ現場改善の原理をAIロボット時代へどう翻訳できるかという点にあります。
2026年、私たちは「トヨタがなぜAIとソフトウェアに巨額の将来投資を振り向けているのか」の正解を目の当たりにしています。
それは単なる自動運転の話ではありません。工場の熱間鍛造ラインから病院の廊下まで、あらゆる「現場(Gemba)」をデジタルな学習資産へと変換する、壮大な知能のインフラ化でした。
しかし, その答えはもっと根源的で, かつ驚くほど具体的でした。
今, トヨタの研究所と現場で起きているのは, 創業以来の哲学である「豊田綱領」、すなわち「研究と創造に心を致し, 常に時流に先んずる」精神と, シリコンバレー発の最先端AI技術との, 静かですが激しい融合です。
ただし, この記事で本当に見るべきなのは企業の大きな看板ではありません。重要なのは, 病院や工場の現場で何を観察し, 何をムダと定義し, どう再設計し, それをAIの学習ループへどう接続しているかです。
本記事では, トヨタイムズの現場レポートと, Toyota Research Institute(TRI)の公開論文・公式発表を突き合わせて読み解くと, そこには一見矛盾する「2つの顔」が見えてきます。
- 一つは, 病院の廊下で看護師の歩数を減らすために床にテープを貼る, 徹底的に「泥臭い現場(Gemba/Genba)」の顔。
- 一つは, 熱間鍛造のラインを止めずにロボットを賢くするために, 仮想空間で数百万回のシミュレーションを回す「最先端AI(High-Tech)」の顔です。
この2つは, 別々のプロジェクトではありません。これこそが, トヨタ独自のロボティクス戦略の両輪なのです。
本記事では, この「現場知」と「学習ループ」がいかにして交差し, 未来の都市Woven Cityへと繋がっていくのかを整理しつつ, 最終的には「自社の現場改善へどう持ち帰れるか」まで落とし込みます。これは単なる技術解説ではありません。テクノロジーがいかにして人間の「幸せ」を量産しうるかという, 壮大な実験の記録です。
現場観察がロボット導入の出発点
トヨタ記念病院の事例が示すのは、ロボット導入の第一歩が高性能な機体の投入ではなく、現場のムダを観察し、患者ケアを圧迫している構造を特定することだという点です。
物語の起点はサーバールームではなく, 病棟の廊下から
物語の起点は, サーバールームではなく, 愛知県にある「トヨタ記念病院」の病棟から始まります。現代日本が直面する少子高齢化と労働力不足。その縮図とも言える医療現場で, トヨタはある深刻な課題に直面していました。看護師の離職率上昇と, 現場の疲弊です。
トヨタ生産方式(TPS)のプロフェッショナルたちが現場に入り, ストップウォッチとビデオカメラで業務を徹底的に分析したとき, 衝撃的なデータが浮かび上がりました。
1.1 「看護」を圧迫するムダ
現場観察の紹介では, 看護師の業務時間のうち約4割が, モノを運ぶ・取りに行くといった付加価値を生まない作業に費やされていたとされます。ただし, B-4の文脈で本当に重要なのは「4割」という数字そのものより, 患者ケアに使うべき時間が, 運搬のムダで削られていたという構造です。
その中心にあったのが, 運搬を伴う「院内の移動」でした。
薬剤を取りに薬剤部へ走る、検体を検査室へ届ける、不足した機材を探し回る。特に夜間帯, 限られたスタッフ数の中で, 看護師たちは病棟を離れ, 広大な院内を歩き回ることに忙殺されていました。これは単なる非効率という言葉では片付けられません。医療安全のリスクであり, スタッフのモチベーションを削ぐ「ムダ」そのものです。
1.2 救世主「Potaro(ポタロ)」の投入

この「運搬のムダ」を解消するために投入されたのが, 院内搬送ロボット「Potaro(ポタロ)」です。
しかし, ここで注目すべきはロボットのスペックではありません。トヨタのアプローチの真骨頂は, ロボットを入れる「前」にありました。彼らは, ただ高機能なロボットを納品して終わりにせず、TPSの視点で, 現場の「動線」そのものを再設計したのです。
- 物理的なカイゼン: 廊下の床に「ポタロ待機位置」のシールを貼り, 人とロボットの動線を物理的に整理しました。
- 運用のカイゼン: 薬剤科のドアを自動化し, エレベーターの通信機能を改修し, スタッフが直感的に使える運用ルールをゼロから構築しました。
ハードウェア(ロボット)を現場に合わせるだけでなく, 現場(環境)をロボットに合わせて歩み寄らせる。この相互適応こそが, 成功の鍵でした。
ここで重要なのは, Potaro の価値が単体ロボットの性能だけでは測れないことです。
実際, トヨタ未来創生センターが2026年3月に公開した公式記事によると, トヨタ記念病院では24台のPotaroが稼働し, 搬送成功率99%, 累積走行距離27,000km(2026年1月時点)に到達しています。これは, 動線再設計・標準化・多台数統括 が機能していることを示す数字です。
1.3 数字が語る「人間性の回復」
公開情報では年間200時間以上の夜勤帯のムダが削減され, 患者へのケアへと還元されました。つまり, 「ロボットが仕事を奪う」という懸念とは裏腹に, ロボットは人間が「人間らしい仕事」に集中するための時間を奪還したのです。
参考:社内資料ベースの詳細数値(検証可能な一次情報とは区別)
※以下はトヨタ社内資料「人間中心のロボティクス変革レポート」に基づく参考値です。
- 夜間薬剤搬送における削減時間:年間7,665分(3部署合計)
- 看護師による薬剤ミキシング時間:年間7,300分削減
- 離職率:10.3%(2017年度)→ 5.3%(2021年度)
現場導入について湧き上がる疑問
- Q. なぜ他社製ロボットでは離職率まで下がらなかった理由は?(→ハードだけでなく「カイゼン」をセットにしたから)
- Q. 20台以上のロボットが動いて渋滞しないのか?(→次章へ)
多台数でも止まらない運用をどう作るか
一台のロボットを動かすことより難しいのは、多台数でも止まらず、現場の邪魔にならない運用を作ることです。ここで効いてくるのが、TPSのJust-in-Timeと異常の見える化の発想です。
一台のロボットを動かすのは簡単です。しかし, 病院という閉鎖空間で20台, 30台のロボットを同時に動かすとなると, 話は別次元の複雑さを帯びてきます。
狭い廊下でのすれ違い, エレベーター前での渋滞, 配送のピークタイムにおけるリソース不足。これらを放置すれば, ロボットたちは立ち往生し, かえって人間の邪魔になります。
ここでトヨタが持ち出した解決策は, 最新のAIアルゴリズムというよりも, 彼らが数十年かけて磨き上げてきた工場の知恵, 「トヨタ生産方式(TPS)」の応用でした。
2.1 ジャストインタイム(Just-in-Time)のロボット版
工場の生産ラインでは, 「必要なものを, 必要な時に, 必要なだけ」供給するジャストインタイムが徹底されています。トヨタはこの思想を, ロボットの群管理制御(フリートマネジメント)に適用しました。
「多台数統括システム」と呼ばれるこの管制塔は, 院内の全ロボットの位置とステータスを把握しています。
- 動的な割り当て: 配送リクエストが発生すると, 最も近く, かつバッテリー残量に余裕のあるロボットを瞬時に選定します。
- 停滞の排除: ロボットを無目的に待機させるのではなく, 次の仕事までのアイドルタイムを最小化するようにルートを計算します。
TPSの柱であるJust-in-Timeは, 公式にも「必要なものを, 必要なときに, 必要なだけ」流す考え方として説明されています。B-4の文脈では, これは単に部品供給の話ではなく, ロボットを必要なタイミングで必要な場所へ割り当てる群管理思想として読み替えると分かりやすくなります。
2.2 インフラ連携(V2I)とアンドン
さらに興味深いのは, ロボットが建物そのものと対話している点です。
Potaroは, エレベーターや自動ドアと無線通信(V2I: Vehicle-to-Infrastructure)を行います。「今から乗るよ」「今は満員だから次の便にして」といったやり取りを機械同士で行うことで, 人間がボタンを押してあげる必要をなくしました。
また, TPSの「アンドン(行灯)」の概念も, 発想として近い形で組み込まれています。もしロボットが障害物で動けなくなったら, システムが即座に異常を検知(見える化)し, 後続のロボットに迂回ルートを指示するか, 遠隔オペレーターに救援を求めます。
つまり, ここで重要なのはV2Iという技術用語そのものより, ロボット単体の賢さではなく, 周囲のインフラも含めて運用を作っていることです。異常を隠さず, 早く見つけて, 止めて, 次の行動へつなげる――この考え方は, AIロボット時代にも有効なTPSの核心です。
こうして, 病院の廊下は, 見えないベルトコンベアのようにスムーズな物流網へと変貌を遂げました。現場の「カイゼン」とデジタルの融合が, ここで一つの完成を見せています。
学習ループがAIロボット開発の主戦場
複雑で不定形な作業では、現場で人が都度調整するやり方に限界があります。ここから重要になるのが、現場を再現した仮想空間で学び、育ててから戻す学習ループです。
第1章と第2章では, 既存の技術と現場改善の組み合わせによる成功を見ました。しかし, トヨタの野望は「搬送」だけにとどまりません。
家庭で洗濯物をたたむ, 料理を手伝う, 工場の複雑な組み立てを行う。こうした「不定形」で「高度な器用さ」を要するタスクにおいて, 従来のアプローチは限界を迎えていました。
3.1 「熱間鍛造ライン」のジレンマ
ここで, 少し視点を変えて, 工場の「熱間鍛造ライン」を想像してください。
金属は数千度に熱せられ, 巨大なプレス機が轟音を立てて動いています。ラインは一瞬たりとも止められません。そんな危険で高コストな環境で, ロボットに「失敗しながら学べ」と言うのは不可能です。
従来のロボット開発では, エンジニアがすべての動作をプログラム(ハードコーディング)していました。「ここでアームを30度曲げ, 速度Xで移動し……」。しかし, 対象物が少しずれただけで, そのプログラムは破綻します。無限に変化する現実世界に対応するために, 無限のコードを書くことはできません。
3.2 パラダイムシフト:モデルより「ループ」を作る
トヨタのリサーチ部門であるTRI(Toyota Research Institute)が出した答えは, 根本的な発想の転換でした。
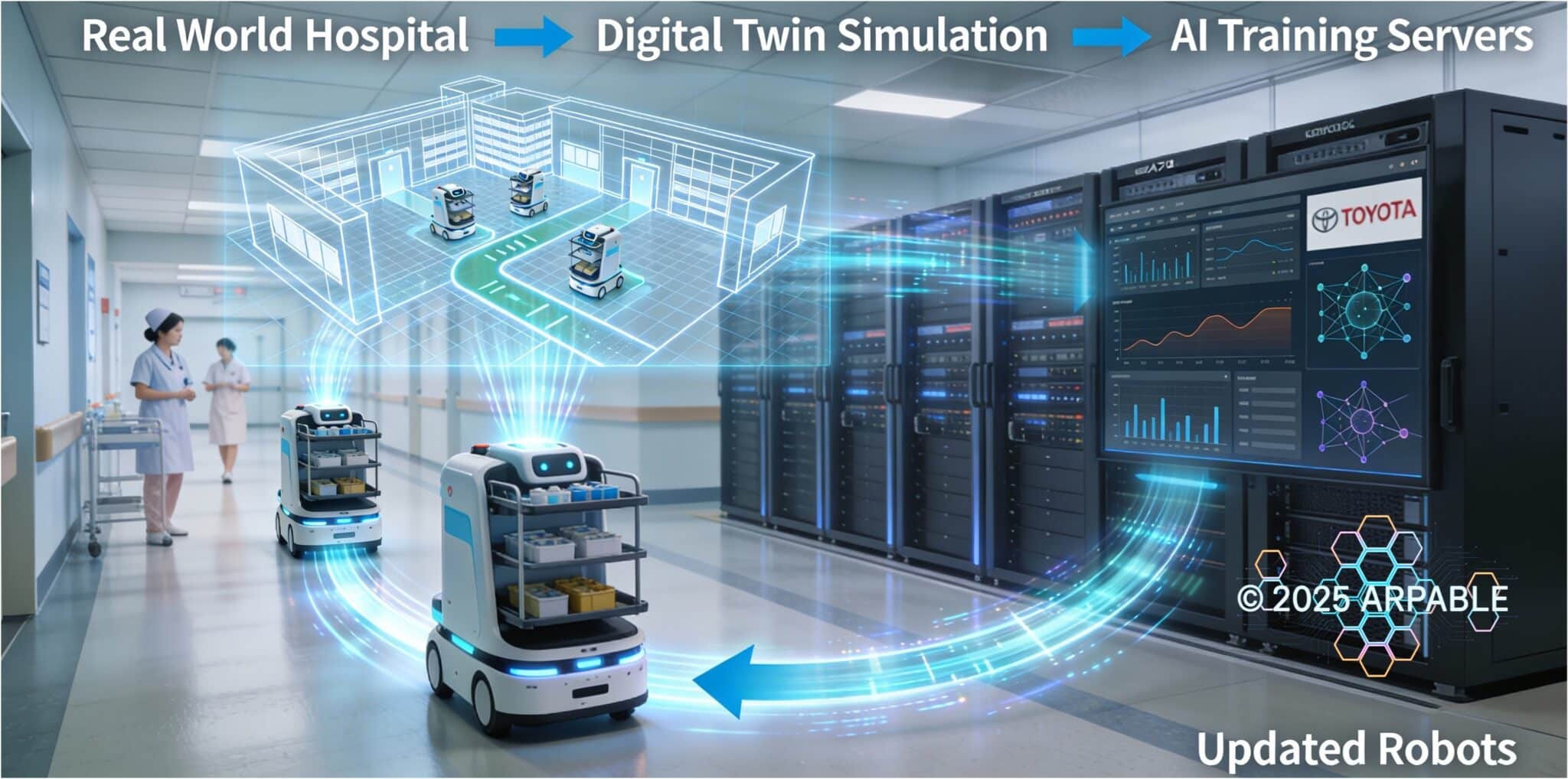
「現場で調整する」のではなく, 「現場を再現した仮想空間で学び, 育ててから現場に戻す」。そして, 「人間がコードを書く」のではなく, 「AIがデータから自律的に学ぶ」。
彼らが構築したのは, 単なるAIモデルではなく, 高速で回転する「学習ループ(Learning Loop)」です。
- データ収集: 人間のデモンストレーションや, シミュレーションでの試行錯誤。
- 学習: 収集したデータから「行動の法則」を学ぶ。
- 評価: 仮想空間および実機でのテスト。
- 展開: 現場への適用。
このループをいかに速く, いかに大規模に回せるか。それが, これからのロボット開発の勝敗を分けると定義したのです。
ここで重要なのは, より賢い単体モデルを作ることではなく, 学習ループそのものを強くすることです。現場で人がまず教え, 機体モデルと環境モデルを仮想空間に載せ, そこで大量試行し, 結果を実機へ戻して評価し, ズレをfine-tuningで微修正しながら再び学習へ返す――この反復は, TPSのカイゼンをデジタル環境へ拡張したものと読むことができます。
Diffusion Policyは何を変えたのか
Diffusion Policyの本質は、ロボットに細かな制御コードを与えるのではなく、人間のデモから行動の意図を学ばせる点にあります。ここで開発の主戦場はコードからデータへ移ります。
この学習ループの中核を担う技術の一つが, 2023年にTRIの研究者らが中心となって発表し, 世界のロボット研究コミュニティで広く引用されるようになった『Diffusion Policy』です。
4.1 画像生成AIの仕組みをロボットへ
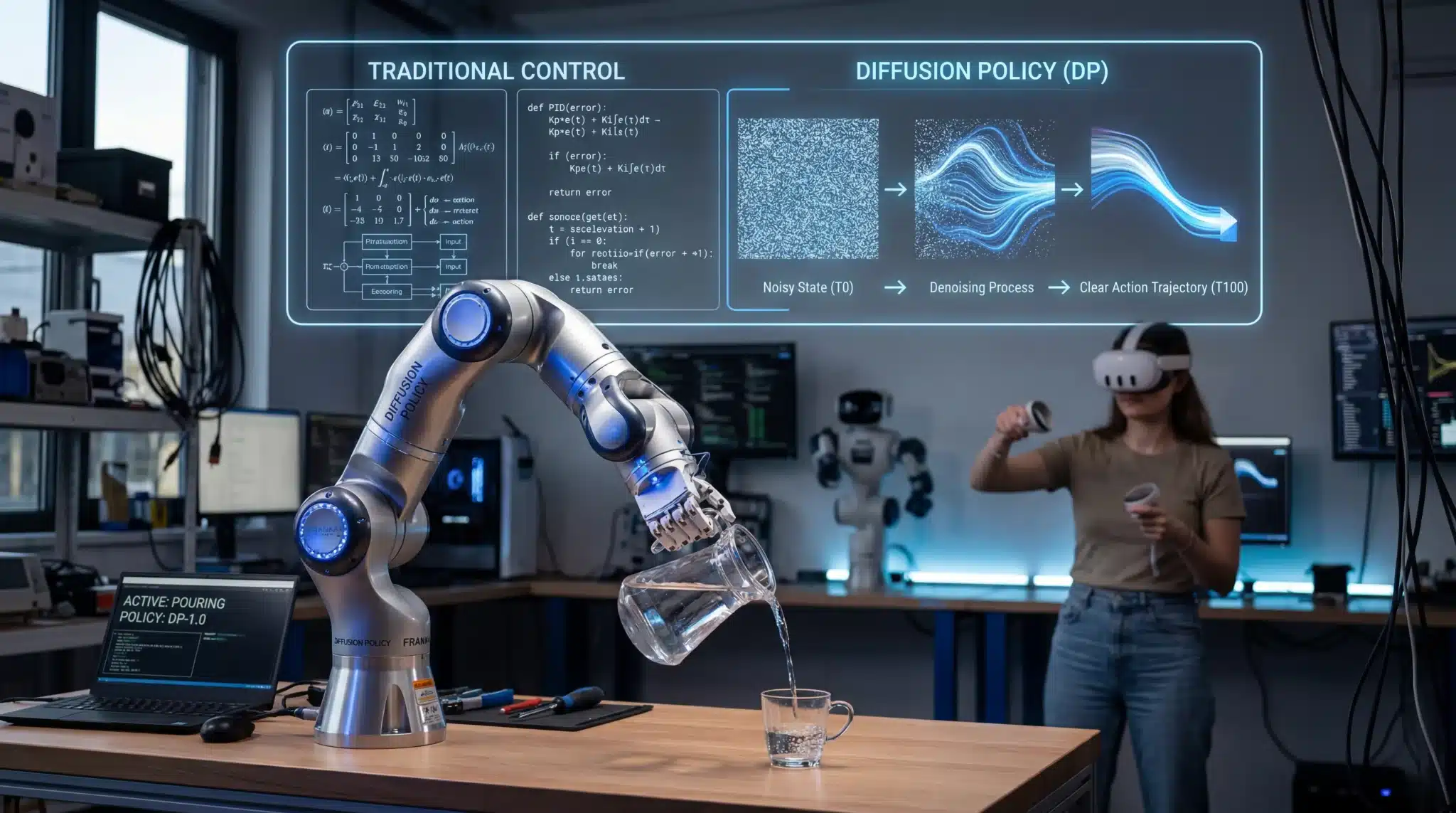
「Diffusion(拡散)」と聞いて, 画像生成AI(Stable Diffusionなど)を思い浮かべる方は鋭いです。Diffusion Policyは, まさにその仕組みをロボットの行動生成に応用したものです。
画像生成AIが「ノイズだらけの画像から, 徐々に鮮明な絵を復元する」ように, Diffusion Policyは「ランダムなノイズから, 状況に最適な『ロボットの行動軌跡』を生成」します。
4.2 「教える」ことの革命
この技術の革新性は, ロボットへの「教え方」を劇的に変えた点にあります。
- 従来:エンジニアが数式とコードで制御ロジックを記述する。
- 現在:人間がVRコントローラーなどで「お手本(デモ)」を見せるだけ。
人間がコップに水を注ぐ動作を数十回やってみせる。ロボットはその映像と, アームにかかる力(触覚データ)などをセットで学習します。すると, Diffusion Policyは「コップの位置が少し変わっても」「照明の明るさが違っても」, 人間が見せた「意図」を汲み取り, 適切な動きを自ら生成できるようになります。
TRIはこの手法を用いて, 皮むき, 液体の注入, 柔軟物の操作など複数タスクで, デモデータ中心に汎化できる可能性を示しています(研究段階)。関連情報は arXiv論文 と TRI公式発表 で確認できます。
将来的には多スキルを一つの枠組みで学習・再利用する構想も語られており, データをスキル資産として積み上げる方向性がロードマップの軸になりつつあります。「データ=スキル」という発想がロードマップを現実寄りにします。
TRIがここで示しているのは, ロボット教示の中心が「コードを書く」ことから「データを集め, 学ばせ, 再利用する」ことへ移っているという点です。B-4の視点で言えば, これは現場の知恵を一度きりの属人的ノウハウで終わらせず, 改善可能な学習資産に変えるという意味を持ちます。
学習技術について湧き上がる疑問
- Q. 手作業だけでなく, 歩行などの全身運動もできるのか?(→次章へ)
- Q. 試行錯誤中にロボットが壊れないのか?(→第6章へ)
LBMは複数動作をどう束ねるか

ロボットが現実の現場で働くには、単一スキルではなく、歩く・持つ・姿勢を変えるといった複数動作を連続的に扱える必要があります。LBMは、そのための基盤モデルに近い試みです。
個別のスキルを覚えるだけでは不十分です。人間が「歩きながら」「ドアを開け」「荷物を抱え直す」ように, ロボットも複数の動作をシームレスに行う必要があります。
そこでTRIが開発しているのが, 「Large Behavior Models (LBM)」です。
5.1 言語モデルから行動モデルへ:VLAへの進化
ChatGPTなどのLLM(大規模言語モデル)が, インターネット上の膨大なテキストを学習してあらゆる質問に答えられるようになったように, LBMはあらゆる「身体的行動」を学習した基盤モデルを目指しています。
LBMは, 単なる動作の模倣ではありません。視覚・言語・行動を統合したVLA(Vision-Language-Action)モデルとして, 「この部屋を片付けて」という曖昧な指示を, 具体的な関節の回転量へと変換する, ロボティクス向けの生成AI/基盤モデル(foundation model for robotics)に近い存在へと進化しています。技術的には「拡散Transformer(Diffusion Transformer)」というアーキテクチャが採用されています。
- 入力: カメラ映像, 言語指示(プロンプト), 自己状態(関節角度など)。
- 出力: 未来の行動系列(例えば1.6秒先までの動き)。
LBMは, これらを統合し, 状況に応じた最適な「振る舞い」をリアルタイムで生成します。
5.2 ヒューマノイド「Atlas」での実証:身体的知能への挑戦
このLBMのアプローチを実証する舞台として選ばれたのが, Boston Dynamicsの電動ヒューマノイド「Atlas」を対象にした, TRIとの共同研究です。
単一のLBMベース方策で歩行とマニピュレーションを協調させる研究デモが公開され, 学習ベースで全身協調制御に近づく方向性が示されています(商用機能ではなく研究段階)。関連情報は Toyota Pressroom で確認できます。
TRIの大規模行動モデル(LBM)に基づくアプローチをBoston Dynamicsの電動Atlasに適用し, 言語条件付きのマルチタスク方策として長い操作タスクをこなす様子が研究デモ(実運用前段階)が公開されています。
従来は, 「歩くための制御プログラム」と「手を動かすための制御プログラム」は別物で, それらを協調させるのに苦労していました。
しかし, Atlasが示す真の衝撃は、そのアクロバティックな動きではありません。
「一度学んだ身体的知能を、別の機体や別の現場へ即座に転送できる」という、動作の標準化(Standardization)がLBMによって現実味を帯びたことです。これはTPSにおける「標準作業」のAI版に他なりません。
重い物体操作や姿勢変化を含むタスクで, Atlasが全身を協調させながらバランスを維持する様子が示されており, 学習ベースで「身体的知能」に近づく方向性が見え始めています(ただし, あくまで研究段階のデモです)。
B-4で重要なのは, 「ヒューマノイドがすごい」という話ではありません。むしろ, 歩行とマニピュレーションをひとつの学習ループに束ね, 複数動作を標準化可能な知能へ近づけていることに意味があります。ここでも主役は機体ではなく, 知能をどう育て続けるかという運用原理です。
Sim-to-Realで失敗コストを下げる
強いモデルを作っても、いきなり現場で試すのは危険です。そこで重要になるのが、仮想空間で大量試行し、失敗コストを限りなく下げてから実機へ戻すSim-to-Realの考え方です。
しかし, LBMのような強力なAIを, いきなり現実世界で動かすのは危険すぎます。そこで重要になるのが, シミュレーション(Simulation)技術です。
6.1 OmniverseとIsaac Simの活用
トヨタはREADY RoboticsやNVIDIAと協業し, Omniverse/Isaac SimとForgeOSを組み合わせたSim-to-Real環境を熱間鍛造ライン向けに構築しています。
この仮想空間は, ロボットにとっての「精神と時の部屋」です。現実では1時間かかる試行錯誤を, 仮想空間なら数秒で, しかも数千台並列で行うことができます。熱間鍛造ラインのような危険な場所も, デジタル上なら何度失敗しても構いません。
6.2 「卒業試験」としてのドメイン・ランダマイゼーション
仮想空間で学習したAIを現実世界に持ってくる際に最大の壁となるのが「Sim-to-Realギャップ(現実とのズレ)」です。摩擦係数の微妙な違いや, 光の反射などが原因で, シミュレータでは完璧だったロボットが現実では動かないことがよくあります。
これを克服するために, トヨタは「ドメイン・ランダマイゼーション」という手法を用いています。シミュレータ内で, 床の滑りやすさ, 照明の色, 物体の重さなどをランダムに変化させ, あえて「意地悪な環境」を作り出します。この過酷な環境で揉みに揉まれたAIモデルだけが, 現実世界への実装(卒業)を許されるのです。
このプロセスにより, 工場レイアウト変更に伴うロボットの再調整コストを, 従来より短いサイクルで回す方向へ近づけます(効果の大きさは適用領域・環境再現度に依存します)。
Sim-to-Realは, B-4の視点で言えば単なる技術ではありません。これは, 現場を止めずに改善を先回りで回すための仕組みです。TPSが現場でムダを減らす思想なら, Sim-to-Realはその思想を仮想空間の側で高速に回す手段だと言えます。
なぜ「賢く止まる」ことが重要か
汎用モデルが強くなるほど、危険な場面で止まれるかどうかが社会実装の条件になります。ここで重要になるのが、失敗を検知し、エスカレーションできる仕組みです。

AIロボットが社会に出るための最後の, そして最も重要なピース。それが安全性です。
研究コミュニティ(TRIを含む)では, VLAのような汎用モデルがどの状況で失敗しやすいかを事前に推定し, 必要なら停止・回避・人へのエスカレーションを行う「失敗検出(Failure Detection)」が重要テーマになっています。代表例がTRIのSAFE研究で, 観測情報や内部表現から「このまま続けると失敗する確率」を推定し, 危険が高い場合は停止や回避, 人へのエスカレーションにつなげる設計が示されています(研究段階)。関連情報は, arXiv / TRI公式 / 研究ページ で確認できます。
- 失敗予知: ロボット自身の内部状態や画像認識から, 「このままいくと失敗する確率」を常に計算します。
- 安全動作: リスクが高まったと判断すると, 即座に停止したり, 動作を巻き戻したり, 人間に助けを求めたりします。
「何でもできるスーパーロボット」よりも, 「危ないときに止まり, 失敗を次の改善へ戻せるロボット」の方が, 社会実装にははるかに重要です。この謙虚な機能こそが, 一般家庭や公道といった予測不能な環境にロボットを送り出すための必須条件なのです。
「AIロボットに、自ら止まる知恵を与える」。
これこそが、豊田佐吉が自動織機で発明した「自働化(Jidoka)」の21世紀における正統進化です。SAFEは単なるエラー検知ではありません。AIが「自分の限界を悟り、人間に助けを求める」という謙虚な知性を実装することで、初めてロボットは「道具」から「信頼できるパートナー」へと昇格するのです。
Woven Cityはどこにつながるのか
Woven Cityは本記事の主役ではありませんが、病院や工場で磨かれた改善ループが、将来どこへ接続されるのかを示す象徴的な実証の場です。
こうした改善ループが、将来的に病院や工場を超えて都市スケールへ拡張される接続先として位置づけられるのが、トヨタのWoven City(ウーブン・シティ)です。
ただし、本記事の主眼は都市全体の未来像ではなく、現場で改善ループをどう回すかにあります。Woven Cityの詳細は、別記事 トヨタ ウーブンシティとは?2025年入居&未来都市計画 で整理しています。
まとめ
トヨタの事例が示しているのは、AIロボット導入の本質が高性能な機体を入れることではなく、現場のムダを観察し、運用を整え、失敗を学習燃料へ変え続けることにあるという事実です。
トヨタのロボティクス変革を俯瞰すると, そこには非常に美しい3層構造が見えてきます。
- Layer 1: The Muddy Field(泥臭い現場)
トヨタ記念病院のように, TPSを用いて現場の物理的な課題を解決し, 運用を整える。これがすべての土台です。 - Layer 2: The Learning Loop(学習の増幅)
OmniverseやSim-to-Realを駆使し, 現場を止めずに, 安全かつ高速にデータを生成・学習するループを回す。 - Layer 3: The Intelligent Core(知能の統合)
Diffusion PolicyとLBMにより, 多様なスキルを汎用的な知能へと昇華させ, Atlasのような身体に宿らせる。
これらを貫く哲学は, 創業以来変わらない「人間中心(Human-Centered)」です。
最先端のAIも, 巨大なシミュレータも, すべては「人間の仕事を奪うため」ではなく, 「人間が人間らしくあるための時間を創り出すため」に存在しています。
・看護師が患者の手を握る時間。
・親が子供と向き合う時間。
・私たちが, 創造的なことに没頭する時間。
トヨタが作ろうとしているのは, ロボットではありません。ロボットというテクノロジーを通じて, そうした「幸せな時間」を量産しようとしているのです。
ただし, B-4の観点で最後に強調したいのは, 競争優位を生むのがロボット単体ではないという点です。現場知を標準化し, 失敗ログを無形資産として蓄積し, 改善ループを止めずに回せる仕組みそのものが, AIロボット時代の本当の資産になります。
「熱間鍛造のライン」から「未来都市のリビング」まで。トヨタの挑戦は, まだ始まったばかりです。しかし, その道筋は, 驚くほど明確に, そして力強く描かれています。
次の一手として有効なのは, まず自社の現場で「付加価値を生まない移動・待ち・探し物」を可視化し, そのうえで学習ループをどこへ組み込むかを設計することです。
専門用語まとめ
- Diffusion Policy(拡散方策)
- 生成AIの「拡散モデル」をロボット制御に応用した技術。デモデータに含まれるノイズを除去するプロセスを通じて, 状況に応じた最適な行動軌跡を生成する。
- LBM / VLA
- 大規模言語モデル(LLM)の概念を身体運動に拡張した大規模行動モデル。視覚(V)・言語(L)・行動(A)を統合し, 汎用的な振る舞いを出力する。
- Sim-to-Real
- シミュレーション(仮想空間)で学習したAIモデルを, 現実世界のロボット(実機)に適用する技術。摩擦や照明などの差異(ギャップ)をどう埋めるかが最大の課題。
- TPS(Toyota Production System)
- 「ムダの徹底的排除」を柱とするトヨタ独自の生産方式。「ジャストインタイム(必要な時に必要なだけ)」と「自働化(異常時に止まる)」が2本柱。
- V2I(Vehicle-to-Infrastructure)
- 車両やロボットと, エレベーター・自動ドア・建物管理システムなどのインフラ設備とが通信し, 連携する技術。ロボットの円滑な移動に不可欠。
- Omniverse / Isaac Sim
- NVIDIA社が提供する, 産業用メタバース開発プラットフォームおよびロボットシミュレータ。物理法則を忠実に再現した仮想空間を作成できる。
- SAFE
- VLA等の汎用ポリシーに対し, タスクや状況に応じた失敗検出を行い, 危険が高い場合に停止や人間へのエスカレーションを促すための研究アプローチ(TRIの研究例)。
よくある質問(FAQ)
Q1.
トヨタのロボット開発は何が違うのですか?
A1.
「現場(TPS)」と「AI(学習ループ)」の両輪駆動である点です。
- 高性能なロボットを作るだけでなく, 現場のルールや動線を整えてから導入する。
- さらにシミュレーション技術で高速に改良し続けるエコシステムを持っている。
関連:まとめへ
Q2.
Potaroの事例から学べる本質は何ですか?
A2.
主役はロボット単体の性能ではなく, 動線と運用を再設計することです。
- 人とロボットの動線を物理的に整理し, 建物インフラ側も調整している。
- 多台数でも止まらない運用を作ることで, 患者ケアへ時間を戻している。
関連:TPSの用語へ
Q3.
Diffusion Policyは何を変えたのですか?
A3.
ロボット教示の中心を「コードを書く仕事」から「データを育てる仕事」へ移した点です。
- 人間のデモから行動の意図を学ばせるため, 細かなルール記述を減らせる。
- 現場の知恵を, 再利用可能な学習資産として蓄積しやすくなる。
Q4.
なぜ「賢く止まる」ことが重要なのですか?
A4.
社会実装では, 何でもできることより, 危険なときに止まれることの方が重要だからです。
- 失敗確率を推定し, 停止・回避・人へのエスカレーションへつなぐ設計が必要。
- これはTPSでいう自働化(Jidoka)をAIロボット時代に翻訳した考え方に近い。
関連:まとめへ
Q5.
中小企業でもこの学習ループの考え方は応用できますか?
A5.
はい。まずは大規模AIより, 現場のムダを可視化して小さな閉ループを作るところから始めるのが現実的です。
- 付加価値を生まない移動・待ち・探し物の把握から始める。
- デジタルツインやシミュレータを使い, 失敗コストの低い改善サイクルを作る。
関連:あわせて読みたいへ
参考サイト・出典
一次情報
- トヨタ自動車 公式ニュースルーム
- トヨタイムズ(トヨタ記念病院×Potaro)
- Toyota Research Institute (TRI) News & Publications
- Diffusion Policy: Visuomotor Policy Learning via Action Diffusion (arXiv)
- Woven City Official Website
二次情報
あわせて読みたい
更新履歴
- 2025年12月24日:初稿公開
- 2026年3月17日:テンプレ v10.2.1 へ適合化し、Potaro・学習ループ・SAFE・Woven Cityまわりの表現を更新
以上