


なぜトヨタは完全無人運転を選ばなかったのか?
世界最大級の自動車メーカーが選んだ「完全無人化」とは異なる道筋とは
はじめに:トヨタが選んだ独自の道
自動運転技術の開発競争が激化する中、トヨタ自動車は他社とは明確に異なるアプローチを取っています。多くの企業が「完全無人運転」を最終目標に掲げる一方で、トヨタは「人間とAIの協調」を核とした「Guardian(ガーディアン)」概念を提唱。この戦略的差異が、同社の自動運転技術開発にどのような影響を与えているのか、詳しく解析します。
かみ砕き解説:なぜトヨタは「人間中心」なのか?
自動運転を「完全に機械に任せる」か「人間と機械が協力する」かの違いは、料理に例えるとわかりやすいでしょう。多くの企業は「全自動調理ロボット」を目指しているのに対し、トヨタは「優秀なアシスタントシェフ」を目指しています。アシスタントは危険を察知したら即座に手を出しますが、基本的には人間シェフの技術を尊重し、サポートに徹するのです。
トヨタ自動運転戦略の全体像
基本方針:段階的アプローチの詳細
トヨタの自動運転開発は、現実的で段階的なアプローチを特徴としています。同社は技術の成熟度と社会受容性を慎重に評価しながら、以下の3つの柱で構成された開発戦略を展開しています。
❶ 予防安全技術の普及(Toyota Safety Sense)
現在市販されている車両に搭載される実用技術で、SAEレベル1-2に相当します。衝突回避支援、車間距離制御、車線維持支援など、日常運転での安全性向上を主目的としています。
❷ 高度運転支援の実用化(Lexus Teammate)
高級車セグメントで展開される高度な運転支援技術で、SAEレベル2-3に相当します。高速道路でのハンズオフ運転や自動車線変更など、より高度な支援機能を提供しています。
❸ 将来技術の研究開発(Woven Planet・Woven City)
2025年の街開き後、段階的にSAEレベル4(2027年目標)、レベル5(2030年以降)の自動運転技術実用化を目指しています。初期は200世帯規模から開始し、2030年までに2,000世帯での実証実験を計画しています。
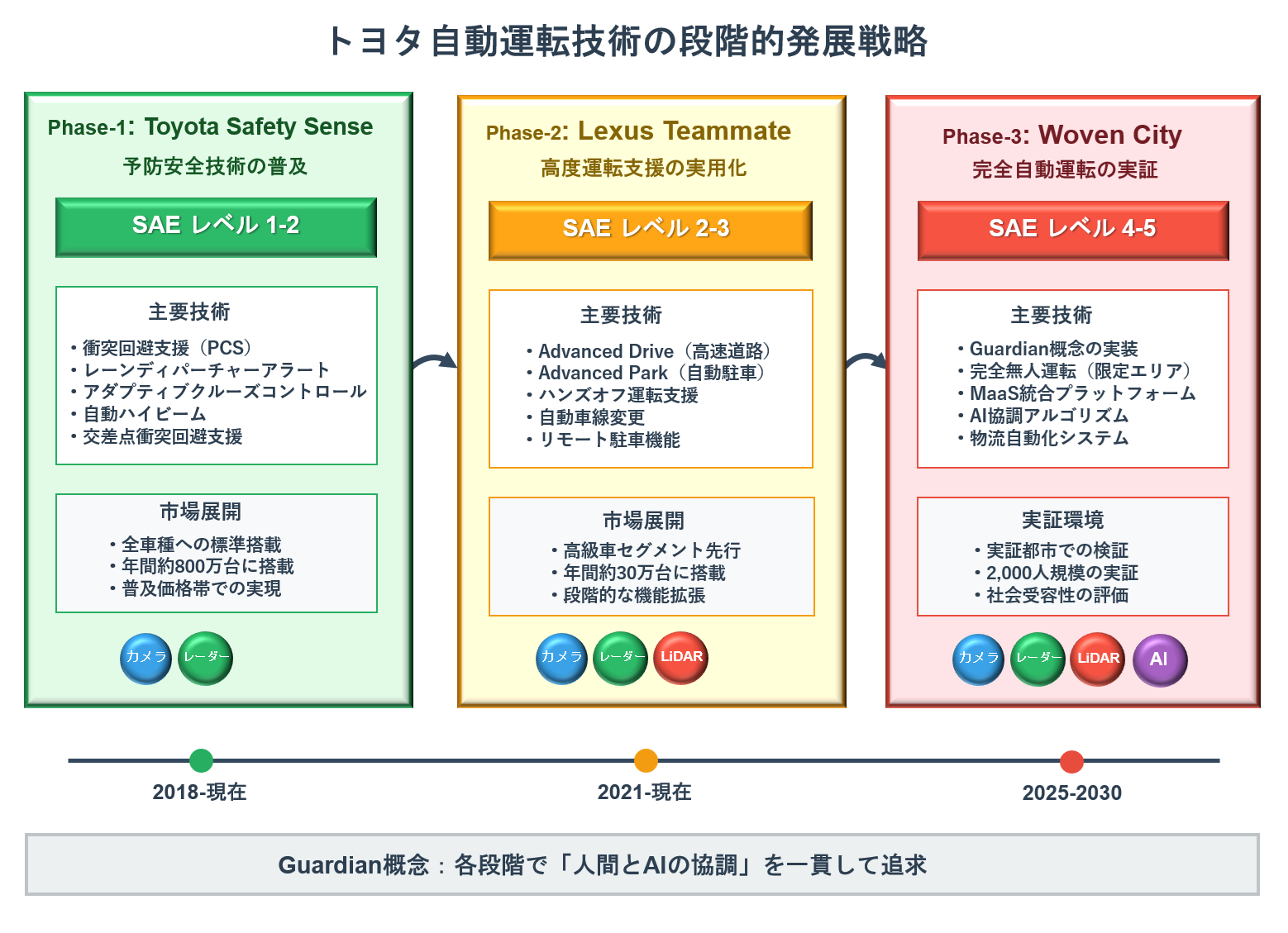
この図は、トヨタの自動運転技術開発における3段階アプローチの全体像を示しています。
Phase 1では基本的な予防安全技術を全車種に普及させ、年間800万台という圧倒的な規模で基盤技術を確立。
Phase 2では高級車セグメントで高度な運転支援技術を実証し、技術的ノウハウを蓄積。
Phase 3のWoven Cityでは、これまでの知見を統合してGuardian概念を完全実装した完全自動運転技術を実証します。
重要なのは、各段階で一貫して「人間とAIの協調」という哲学が貫かれている点で、この段階的アプローチにより安全性と社会受容性を両立させています。
Guardian概念:人間中心の自動運転哲学
トヨタが提唱する「Guardian」概念は、自動運転技術に対する同社の根本的な哲学を表しています。この概念は、技術的な実装方法だけでなく、社会における自動運転技術の位置づけに関する重要な示唆を含んでいます。
Guardian vs Chaufferの根本的違い
Guardian(ガーディアン)モデル:人間が主役、AIが脇役
→ 人間の判断を尊重し、危険時のみ積極介入
→ 運転技能の維持・向上を支援
Chauffeur(ショーファー)モデル:AIが主役、人間は乗客
→ AI が全ての判断を行い、人間は介入しない
→ 完全な運転権限の移譲

この図は、トヨタのGuardian概念と他社が多く採用するChauffeur概念の根本的違いを視覚化したものです。Guardian(左側)では人間が主導権を保持し、AIは安全の守護者として危険時のみ介入します。対照的にChauffeur(右側)ではAIが完全に運転を担い、人間は単なる乗客となります。重要なのは、Guardianアプローチでは人間の運転技能が維持される点です。緊急時にAIシステムが故障した場合でも、運転技能を保持した人間が対応できるため、より安全で現実的な自動運転の実現が可能になります。
Guardian概念の技術的実装
Guardian概念は単なる哲学にとどまらず、ドライバーモニタリングシステム(DMS)とAI判断エンジンを統合した具体的な技術アーキテクチャとして実装されています。
システムは赤外線カメラ、ステアリング・ペダル操作センサー、生体情報モニターを用いて100msec間隔で人間の状態を監視し、以下の4段階で介入します。
- 予測的介入:危険な状況を事前に察知し警告
- 緊急時介入:衝突の可能性が高い場合の自動制御
- 支援的介入:運転負荷軽減のための補助制御
- 学習的介入:運転パターン学習による個別最適化
Toyota Safety Sense:予防安全技術の進化
現在の技術レベルと普及状況
Toyota Safety Senseは、2015年の初代システム導入以来、継続的な進化を遂げています。現在は第3世代(Toyota Safety Sense 3.0)が最新版として展開されており、SAE基準でのレベル1-2に相当する運転支援技術を提供しています。
▶ Toyota Safety Senseの進化と主要機能比較を見る(クリックで開閉)
| 世代 | 導入時期 | 主要機能 | 技術的特徴 |
|---|---|---|---|
| TSS 1.0 | 2015年 | 基本的衝突回避支援 | 単眼カメラ+ミリ波レーダー |
| TSS 2.0 | 2018年 | 歩行者・自転車検知 | 高精度カメラ+レーダー |
| TSS 3.0 | 2022年 | 交差点対応・二輪車検知 | AI画像認識+統合制御 |
Toyota Safety Sense 3.0の革新的機能
最新版のTSS 3.0では、AI技術の活用により大幅な性能向上を実現しています。特に注目すべきは、従来困難とされていた複雑な交通環境での安全支援が可能になった点です。
❶ プリクラッシュセーフティの高度化
従来の車両・歩行者検知に加え、自転車や二輪車の検知精度が大幅に向上。さらに交差点での右折時における対向車・歩行者検知機能を新搭載し、最も事故リスクの高いシーンでの安全性を向上させています。
❷ レーントレーシングアシストの進化
単純な車線維持から、道路形状に応じた適応的制御へと進化。カーブの曲率や勾配を事前に認識し、自然な運転フィールを維持しながら正確な車線中央維持を実現しています。
❸ レーダークルーズコントロールの知能化
前走車の動きを予測的に解析し、より自然な加減速制御を実現。割り込み車両への対応速度も向上し、運転者の違和感を大幅に軽減しています。
Lexus Teammate:高級車向け高度運転支援
Advanced Drive機能の詳細解析
レクサスLSとMIRAIに搭載されている「Advanced Drive」は、トヨタの高度運転支援技術の集大成です。この技術は、限定的な条件下でSAEレベル3相当の自動運転を実現し、Guardian概念の実装例として重要な意味を持っています。
技術的アーキテクチャ
Advanced Driveシステムは、以下の高精度センサー群で構成されています:
- 高解像度カメラ:12メガピクセル×8台の多角度配置
- ミリ波レーダー:短・中・長距離対応の5台構成
- LiDAR:360度スキャン対応の高精度測距センサー
- GPS/準天頂衛星:センチメートル級の高精度測位
- 慣性センサー:車両姿勢の精密測定
なぜLexusで先行展開するのか?
高級車での先行展開には戦略的理由があります。まず、高価格帯では先進技術のコストを吸収しやすく、早期の技術検証が可能です。また、Lexusユーザーは新技術への理解度が高く、フィードバックの質も優れているため、技術改良のサイクルを効率化できます。さらに、ブランド価値向上にも寄与し、将来の普及車への展開時にも技術的優位性を訴求できるのです。
Advanced Park機能の革新性
駐車支援技術であるAdvanced Parkは、単なる自動駐車を超えた革新的機能を提供しています。特にリモート機能は、狭い駐車場や複雑な駐車環境での利便性を大幅に向上させています。
リモート駐車の技術的詳細
スマートフォンアプリを使用した車外からの操作により、以下の駐車動作が可能です:
- 並列駐車:路上での縦列駐車を完全自動化
- 縦列駐車:駐車場での前進・後退駐車対応
- 狭小スペース対応:人間では操作困難な環境での駐車
- 出庫支援:駐車スペースからの自動出庫
Woven Planet:ソフトウェア・AI開発の中核拠点
設立背景とデジタル変革への対応
2021年1月に設立されたWoven Planet(2023年にWoven by Toyotaへ統合)は、自動車産業のデジタル変革に対応するトヨタの戦略的投資です。2024年末時点で約3,000名の研究開発人員を擁し、AI・ソフトウェア領域での技術開発を加速しています。
組織構造とグローバル展開
Woven Planetは以下の拠点でグローバルな開発体制を構築しています:
- 東京本社:戦略策定・アジア市場対応
- シリコンバレー:AI・機械学習技術開発
- ロンドン:シミュレーション・検証技術
- アナーバー:車両統合・実証実験
主要開発領域と技術的成果
Woven Planetでは、従来の自動車メーカーの技術開発とは異なるアプローチで、以下の領域での技術開発を進めています。
❶ 自動運転AI技術
深層学習・機械学習技術を活用した高度な認識・判断・制御アルゴリズムの開発。特に、Guardian概念を実装するための人間-AI協調アルゴリズムの研究に注力しています。
❷ センサーフュージョン技術
異なる特性を持つ複数センサーからの情報を統合し、より正確で信頼性の高い環境認識を実現する技術開発。冗長性確保による安全性向上も重要な要素です。
❸ シミュレーション技術の革新
実世界での検証が困難な極限状況(エッジケース)や低頻度事象を高精度仮想環境で再現し、強化学習と模倣学習を組み合わせてAIの学習効率を向上させる技術開発を行っています。特に、1万時間相当の実走行データを数時間でシミュレート可能な並列処理技術を実装しています。

図3 センサーフュージョン:複数センサーの統合による高精度認識
この図は、トヨタの自動運転システムにおけるセンサーフュージョン技術の仕組みを視覚化したものです。
カメラは色彩や文字認識に優れるものの悪天候に弱く、LiDARは高精度3D計測が可能だが雨霧の影響を受け、レーダーは全天候対応だが分解能に限界があります。
これら異なる特性を持つセンサーからの情報をAIが統合処理することで、単一センサーでは不可能な95%以上の高精度認識を実現します。
重要なのは、この技術的統合にGuardian概念が組み込まれている点で、センサー情報だけでなく人間の状態も同時に監視し、最適なタイミングでの協調制御を可能にしています。
Woven City:実証都市プロジェクトの全貌
プロジェクト概要と設計思想
静岡県裾野市に建設中のWoven Cityは、トヨタが描く未来社会のプロトタイプです。単なる自動運転技術の実証にとどまらず、AI、IoT、ロボティクス、エネルギー管理など、様々な先端技術が統合された「Connected City」として設計されています。
都市インフラの革新的設計
Woven Cityの道路設計は、従来の都市計画とは根本的に異なるアプローチを採用しています。
- Speed道路:自動運転車専用の高速移動路
- City道路:自動運転車と歩行者の混在道路
- Park道路:歩行者専用の緑豊かな散策路
自動運転実証実験の具体的内容
Woven Cityでは、制御された環境下で様々なレベルの自動運転技術を実証する計画です。特に、Guardian概念の実装と検証が重要な目的の一つとなっています。
❶ レベル4自動運転の実証
限定されたエリア内でのGeoфenced運転により、完全自動運転技術の安全性と実用性を検証します。人間の監視なしでの運転が可能ですが、緊急時には遠隔オペレーションセンターからの介入も可能な体制を構築しています。
❷ MaaS統合プラットフォーム
個人の移動ニーズに応じて、自動運転車、公共交通、シェアリングサービスを統合したモビリティサービスを提供。利用者の行動パターンを学習し、最適な移動手段を提案するAIシステムを実装します。
❸ 物流自動化システム
住民への配送サービスを自動運転車両で提供し、「ラストワンマイル」の物流課題解決を実証。特に高齢者や身体的制約のある住民への配慮も重要な検証項目です。
技術的アプローチの詳細分析
センサー技術の統合戦略
トヨタの自動運転システムは、複数のセンサーを組み合わせた「センサーフュージョン」技術を核としています。これは単一センサーの限界を補完し、より信頼性の高い環境認識を実現するための重要な技術です。
マルチモーダルセンサー構成
▶ トヨタ自動運転車のセンサー構成と特性を見る(クリックで開閉)
| センサー種別 | 検知能力 | 得意分野 | 制限事項 |
|---|---|---|---|
| 高解像度カメラ | 色彩・テクスチャ | 標識・信号・レーン認識 | 悪天候・逆光に弱い |
| LiDAR | 高精度3D形状 | 距離測定・障害物検知 | 雨・雪・霧の影響 |
| ミリ波レーダー | 速度・距離 | 全天候・長距離検知 | 分解能の限界 |
| 超音波センサー | 近距離物体 | 駐車支援・低速域 | 検知範囲が狭い |
AI・機械学習技術の実装
トヨタの自動運転システムでは、Guardian概念を実現するために特別に設計されたAI技術が使用されています。これは従来の「人間を排除する」AIとは異なり、「人間と協調する」AIとして開発されています。
人間-AI協調アルゴリズム
Guardian概念の核となる技術は、人間の意図を理解し、適切なタイミングで介入するAIアルゴリズムです。
- 注意状態監視:ドライバーの視線・姿勢・生体情報から注意レベルを推定
- 運転意図予測:ステアリング・アクセル操作から運転者の意図を推測
- リスク評価:交通状況と人間の状態を総合してリスクレベルを算出
- 介入判断:Guardian概念に基づく適切な介入タイミングの決定
なぜ「協調」が重要なのか?
完全自動運転が実用化されても、緊急時や予期しない状況では人間の判断が必要になる場面が必ず発生します。その際、AIに依存しきった人間は適切な判断ができなくなる「スキル劣化」が問題となります。Guardian概念では、人間の運転技能を維持しながらAIが支援するため、いざという時の対応力が保たれるのです。これは、自動運転技術の社会実装において極めて重要な視点といえるでしょう。
競合他社との戦略比較
自動運転開発アプローチの根本的違い
自動運転技術の開発において、各社は異なる哲学とアプローチを採用しています。これらの違いは、技術的な実装方法だけでなく、社会実装戦略や事業モデルにも大きな影響を与えています。
主要プレイヤーの戦略分析
▶ 主要企業の自動運転戦略比較を見る(クリックで開閉)
| 企業 | 基本哲学 | 技術アプローチ | 展開戦略 | 事業モデル |
|---|---|---|---|---|
| トヨタ | Guardian(人間中心) | 段階的・協調型 | 安全性重視の普及 | 車両販売+サービス |
| テスラ | FSD(完全自動運転) | カメラ中心・学習重視 | アグレッシブ展開 | サブスクリプション |
| Waymo | Robotaxi(無人運転) | LiDAR・高精度地図 | 限定エリア特化 | 配車サービス |
| GM Cruise | 都市部無人配車 | 都市特化・専用車両 | サービス先行 | MaaS特化 |
トヨタの差別化要因
トヨタのアプローチは、他社と比較して技術的完成度よりも社会実装における段階的普及と安全性確保を重視した戦略で差別化を図っています。ただし、これは開発速度の面では劣势となる可能性もあります。
❶ 製造・品質管理のDNA
年間約1,000万台の自動車を生産する世界最大級のメーカーとして、品質管理と量産技術で圧倒的な優位性を持っています。自動運転技術においても、この製造業としてのDNAが安全性と信頼性の確保に活かされています。
❷ グローバルサプライチェーン
世界170カ国以上での販売・サービス網を活用し、地域特性に応じた自動運転技術の展開が可能です。特に新興国市場でのインフラ制約を考慮した技術開発は、他社にない強みといえます。
❸ 段階的普及による社会受容性
急進的な技術導入ではなく、段階的なアプローチにより社会の受容性を高めながら技術を普及させる戦略は、長期的な市場形成において有効です。
投資・提携戦略の分析
戦略的投資の全体像
トヨタは自動運転技術の開発において、単独開発にこだわらず、戦略的な投資と提携を積極的に展開しています。これは技術開発の効率化だけでなく、リスクの分散と多様なアプローチの確保を目的としています。
主要投資先の分析
❶ Aurora(米国)への投資
2019年に5億9,000万ドルを投資したAuroraは、トラック向け自動運転技術で先行する企業です。トヨタは商用車分野での自動運転技術を補完し、物流業界への展開を加速させる狙いがあります。
❷ Pony.ai(中国)との提携
中国市場特有の交通環境への対応と、現地の規制・文化に適合した技術開発を目的とした提携です。中国の複雑な交通環境での技術検証により、グローバル展開時の技術的優位性確保を図っています。
❸ May Mobility(米国)への投資
自動運転シャトルサービスに特化したMay Mobilityへの投資により、MaaS分野での技術・ノウハウを獲得。特に高齢者や移動制約者向けのモビリティサービスでの知見を蓄積しています。
技術シナジーの創出
これらの投資・提携により、トヨタは以下のシナジー効果を狙っています:
- 技術的多様性:異なるアプローチの技術を組み合わせたリスク分散
- 地域適応力:各地域の交通環境・規制に対応した技術開発
- 開発効率化:外部リソースの活用による開発スピード向上
- 新市場開拓:新たな事業機会の発見と先行投資
規制・法的対応と標準化への取り組み
日本国内での実証実験と規制対応
トヨタは日本政府の自動運転実証実験政策に積極的に参加し、規制緩和と社会実装の両面で重要な役割を果たしています。
政府連携プロジェクト
❶ SIP-adus(戦略的イノベーション創造プログラム)
内閣府主導の国家プロジェクトに参加し、産学官連携による自動運転技術の社会実装を推進。特に高精度地図の整備やV2X通信技術の標準化に貢献しています。
❷ 国土交通省認定実証実験
愛知県や東京都での公道実証実験を通じて、実際の交通環境での技術検証と社会受容性の向上を図っています。
❸ 地方自治体との連携
過疎地域での移動手段確保や高齢者のモビリティ支援など、社会課題解決型の実証実験を展開しています。
国際標準化への貢献
トヨタは自動運転技術の国際標準化において、日本企業として重要な役割を担っています。
主要標準化活動
- ISO 26262(機能安全):自動運転システムの安全性評価基準策定
- SAE J3016(自動運転レベル定義):国際的な自動運転レベル分類の標準化
- IEEE標準(通信・データ交換):V2X通信やデータフォーマットの標準化
今後の展望と中長期戦略
2025-2030年のロードマップ
トヨタの自動運転技術ロードマップは、技術的実現可能性と社会受容性のバランスを重視した現実的な計画となっています。
短期目標(2025年まで)
❶ Toyota Safety Sense 3.0の全車種展開
現在高級車に限定されている最新の予防安全技術を、普及価格帯の車種まで拡大展開。年間販売台数の80%以上への搭載を目標としています。
❷ Lexus Teamateの機能拡張
現在の高速道路限定から、一般道路での運転支援機能を段階的に追加。特に交差点や信号機のある環境での支援機能を強化します。
❸ Woven Cityでの本格実証開始
2025年の街開きに向けて、住民2,000人規模での実証実験を本格化。Guardian概念の実装検証と社会受容性の評価を実施します。
中期目標(2030年まで)
❶ レベル3自動運転の市販車搭載
高速道路での条件付き自動運転(SAEレベル3)を一般消費者向け車両で実現。ドライバーの監視義務を軽減し、運転負荷の大幅軽減を図ります。
❷ 都市部限定レベル4技術の実証
Woven Cityでの実証結果を基に、実際の都市部での限定的な無人運転技術を展開。特に高齢者向けモビリティサービスでの実用化を目指します。
❸ Guardian概念の技術的完成
人間とAIの理想的な協調関係を実現する技術の完成を目指し、他社との決定的な差別化を確立します。
技術的課題と解決策
現在直面している主要課題
自動運転技術の実用化には、まだ多くの技術的課題が残されています。トヨタはこれらの課題に対して、独自のアプローチで解決策を模索しています。
❶ エッジケースへの対応
交通事故の多くは予測困難な稀な状況(エッジケース)で発生します。Guardian概念では、AIが判断困難な状況で人間に運転権限を移譲する仕組みを構築し、この課題に対応しています。
❷ センサーコストの削減
現在の高精度センサーは非常に高価で、量産車への搭載が困難です。トヨタは量産効果と技術革新により、2030年までに現在の1/10程度までのコスト削減を目標としています。
❸ AI判断の説明可能性
事故発生時の責任所在を明確化するため、AIの判断過程を説明可能にする技術開発を進めています。Guardian概念では人間の最終判断を重視することで、この課題を軽減しています。
社会実装における課題と対策
社会受容性向上への取り組み
技術的な完成度だけでなく、社会における受け入れられやすさも自動運転普及の重要な要素です。トヨタは技術開発と並行して、社会実装のための環境整備にも力を入れています。
消費者教育とリテラシー向上
自動運転技術の正しい理解促進のため、以下の取り組みを実施しています:
- 体験施設の設置:全国のトヨタ販売店での体験機会提供
- 教育プログラム:運転者向けの技術理解促進セミナー
- メディア連携:正確な情報発信と誤解の解消
- シミュレーター体験:実際の運転感覚での技術体験機会
インフラ整備との連携
自動運転技術の効果的な活用には、道路インフラの整備が不可欠です。トヨタは官民連携により以下の整備を推進しています:
- 道路標示の標準化:AI認識に最適化された道路標示
- 信号機の高度化:V2I通信対応信号システムの普及
- 通信インフラ:5G/6G通信網の活用
- 高精度地図:リアルタイム更新システムの構築
市場展望と経済効果予測
自動運転市場の成長シナリオ
トヨタの市場戦略は、技術的実現可能性と経済性を両立させた現実的なアプローチに基づいています。同社は急激な市場変化よりも、持続可能な成長を重視した展開を計画しています。
段階的市場展開戦略
❶ 2025年:予防安全技術の標準装備化
Toyota Safety Sense 3.0を全車種に標準装備し、年間約800万台の車両に搭載。これにより基盤技術の普及とコスト削減を同時に実現します。
❷ 2027年:高度運転支援の普及拡大
現在レクサスに限定されているLexus Teammate相当の機能を、トヨタブランドの中高級車に展開。市場規模を年間約300万台に拡大します。
❸ 2030年:レベル3-4技術の市場投入
Woven Cityでの実証結果を基に、条件付き自動運転技術を実用化。初期は年間約50万台からスタートし、段階的に拡大する計画です。
経済効果と社会的インパクト
自動運転技術の普及は、単なる利便性向上にとどまらず、社会全体に大きな経済効果をもたらすと期待されています。
定量的効果の予測
| 効果分野 | 現在の問題 | 改善効果 | 経済価値 |
|---|---|---|---|
| 交通事故削減 | 年間約41万件の事故 | 30-50%削減可能 | 約1.5兆円の損失軽減 |
| 交通渋滞緩和 | 年間約38.1時間の渋滞 | 20-30%の効率化 | 約0.8兆円の時間価値創出 |
| 高齢者モビリティ | 運転免許返納による移動制約 | 安全な移動手段の提供 | 約0.3兆円の社会保障費削減 |
| 物流効率化 | ドライバー不足・配送コスト高 | 無人配送の実現 | 約0.5兆円のコスト削減 |
新産業の創出
自動運転技術の普及により、以下の新たな産業分野の創出が期待されています:
- MaaS統合プラットフォーム:移動サービスの統合・最適化
- データ解析サービス:交通データの収集・分析・活用
- 遠隔監視・制御:自動運転車両の遠隔オペレーション
- AI教育・トレーニング:自動運転AI の継続的学習サービス
出典リンクを見る
- 交通事故削減:国交省 ASV報告書
- 交通渋滞緩和:RIETI報告
- 高齢者モビリティ:国交省 社会受容調査
- 物流効率化:国交省 物流DX
- 新産業の創出:PwC Japan
よくある質問(Q&A)
Q. 自動運転車は交通事故を減らせますか?
A. 国交省の試算では、自動運転の導入により交通事故を30〜50%削減でき、年間1.5兆円の損失軽減が見込まれます。
Q. 自動運転は渋滞解消に効果がありますか?
A. 経済産業省『自動車新時代戦略会議』中間整理(2024年)では、車両の協調制御により渋滞が最大30%緩和され、0.8兆円規模の時間価値が創出される可能性があると報告されています。
Q. 高齢者にとって自動運転の利点は?
A. 免許返納後の安全な移動手段として期待されており、移動制約の解消と社会保障費0.3兆円の削減が見込まれます。
Q. 自動運転は物流業界にも貢献しますか?
A. 無人配送や長距離運転の自動化により、ドライバー不足を解消し、年間0.5兆円のコスト削減が可能とされています。
Q. 自動運転で新たな産業は生まれますか?
A. MaaSやスマートシティの実現を通じて、地域公共交通や次世代サービス産業の成長が期待されています。
まとめ:トヨタが描く自動運転の未来
トヨタ自動車の自動運転戦略は、「人間中心」の哲学に基づいた独自のアプローチを特徴としています。Guardian概念による人間とAIの協調、段階的な技術普及、そしてWoven Cityでの実証実験を通じて、同社は持続可能で社会に受け入れられる自動運転技術の実現を目指しています。
完全無人運転を急ぐ競合他社とは一線を画し、安全性と実用性を重視した開発戦略は、トヨタらしい堅実なアプローチと言えるでしょう。世界最大級の自動車メーカーとしての技術力と量産力、グローバルなサプライチェーン、そして長年にわたる品質管理のノウハウを活かし、自動運転技術の普及において重要な役割を果たすことが期待されます。
技術的な課題や社会実装における障壁は残るものの、Woven Cityでの実証結果や新技術の市場投入により、トヨタの自動運転戦略がどのような成果を生み出すかは、自動車業界全体だけでなく、モビリティ社会の未来を占う重要な指標となるでしょう。
Guardian概念が示す「人間とテクノロジーの理想的な関係性」は、AI時代における技術と人間の共存モデルとして、自動車産業を超えて医療AI、産業ロボット、スマートシティ等の幅広い分野への応用可能性を秘めており、日本発の新たなAI倫理・設計思想として国際的な影響力を持つ可能性があります。
参考サイト
- トヨタ自動車株式会社 公式サイト
- Woven by Toyota 公式サイト
- 国土交通省 自動運転技術の開発・普及に向けた取組み
- 経済産業省 自動車産業政策
- SAE International J3016 自動運転技術標準
- 一般社団法人日本自動車工業会(JAMA)
- ISO 26262 機能安全国際規格
以上
筆者プロフィール:
ケニー狩野(中小企業診断士、PMP、ITコーディネータ)
キヤノン(株)でアーキテクト、プロジェクトマネジャーとして多数のプロジェクトをリード。
現在、
・株式会社ベーネテック代表
・株式会社アープ取締役
・一般社団法人Society 5.0振興協会評議員ブロックチェーン導入評価委員長。
これまでの知見を活かしブロックチェーンや人工知能技術の推進に従事。
趣味はダイビングと囲碁。2018年「リアル・イノベーション・マインド」を出版。
{
“@context”: “https://schema.org”,
“@type”: “FAQPage”,
“mainEntity”: [
{
“@type”: “Question”,
“name”: “自動運転車は交通事故を減らせますか?”,
“acceptedAnswer”: {
“@type”: “Answer”,
“text”: “国交省の試算では、自動運転の導入により交通事故を30〜50%削減でき、年間1.5兆円の損失軽減が見込まれます。”
}
},
{
“@type”: “Question”,
“name”: “自動運転は渋滞解消に効果がありますか?”,
“acceptedAnswer”: {
“@type”: “Answer”,
“text”: “経産研の報告では、車両の協調制御により渋滞が最大30%緩和され、0.8兆円規模の時間価値が創出される可能性があります。”
}
},
{
“@type”: “Question”,
“name”: “高齢者にとって自動運転の利点は?”,
“acceptedAnswer”: {
“@type”: “Answer”,
“text”: “免許返納後の安全な移動手段として期待されており、移動制約の解消と社会保障費0.3兆円の削減が見込まれます。”
}
},
{
“@type”: “Question”,
“name”: “自動運転は物流業界にも貢献しますか?”,
“acceptedAnswer”: {
“@type”: “Answer”,
“text”: “無人配送や長距離運転の自動化により、ドライバー不足を解消し、年間0.5兆円のコスト削減が可能とされています。”
}
},
{
“@type”: “Question”,
“name”: “自動運転で新たな産業は生まれますか?”,
“acceptedAnswer”: {
“@type”: “Answer”,
“text”: “MaaSやスマートシティの実現を通じて、地域公共交通や次世代サービス産業の成長が期待されています。”
}
}
]
}
.simple-box4 {
border: 2px solid #6082e6;
padding: 15px;
margin: 20px 0;
background-color: #f8f9ff;
border-radius: 8px;
}
.simple-box2 {
border: 2px solid #ccc;
padding: 15px;
margin: 20px 0;
background-color: #f9f9f9;
border-radius: 8px;
}
.author-profile-box {
margin-top: 30px;
overflow: hidden;
}
.related-articles-box {
background-color: #f0f8ff;
padding: 15px;
border-radius: 5px;
}
.styled-table {
width: 100%;
border-collapse: collapse;
margin: 20px 0;
font-size: 14px;
}
.styled-table th, .styled-table td {
padding: 12px;
text-align: left;
}
pre {
background-color: #f4f4f4;
border: 1px solid #ddd;
border-radius: 4px;
padding: 15px;
overflow-x: auto;
font-family: ‘Courier New’, monospace;
font-size: 13px;
line-height: 1.4;
}
code {
background-color: #f4f4f4;
padding: 2px 4px;
border-radius: 3px;
font-family: ‘Courier New’, monospace;
}
svg {
width: 100%;
height: auto;
margin: 20px 0;
border: 1px solid #ddd;
border-radius: 8px;
}








