

.jpg.webp)
※本記事は継続的に最新情報へアップデートしています。
「PoCでは動いた。でも本番で止まった」——この一言が、2026年のロボット導入現場で繰り返されています。
原因はAIの性能不足ではありません。仮想空間と現実の間にある「ズレ」を、学習へ戻す仕組みがなかっただけです。
Physical AIとは、この循環を設計の中心に置いたAIシステムです。身体で経験し、失敗から学び、現場で強くなる。
本記事では、その仕組み・市場構造・投資判断軸を、実装と経営の両面から整理します。あなたの会社は、学習ループを持っていますか?
✅ この記事の結論
- ポイント1:Physical AIとは、身体を持つAIが現実世界で行動し、その経験データで学び続けるAIシステムです。
- ポイント2:2026年の競争軸は、ハード単体からSim↔Realの双方向ループへ移っています。
- ポイント3:勝ち筋は、脳/推論・身体/部品・運用OS・学習燃料の4レイヤーで決まります。
- ポイント4:関連銘柄を見るときは、シェアよりもどのレイヤーのボトルネックを握っているかを確認すべきです。
押さえておきたい主要数値
- SoftBank×ABB Robotics買収合意額:$5.375B(2025年10月に買収契約を正式発表。規制当局承認などを経てクロージング予定)
- Unitree G1価格:公式サイトでは税・送料別US $13.5Kから。販売経路・構成によって価格は変動し、研究・教育向け構成ではより高額になる。低価格ヒューマノイドの代表例
- Physical AIの投資判断軸:ロボット本体価格だけでなく、運用OS、保守、更新、学習データ、責任分界まで含めて見る
この記事の著者・監修者 ケニー狩野(Kenny Kano)

Physical AIとは?身体を持つAIが現実から学ぶ仕組み
ロボットが賢くなる瞬間は、モデルが大きくなった時ではなく、現場の失敗を次の学習へ戻せた時です。
Physical AI(身体性AI)とは、センサーとアクチュエータを持つ“身体”が現実世界で行動し、その経験データを学習・評価・再配備へ戻すことで、知能を継続的に更新していくAIシステム体系です。
従来のロボットは、あらかじめ定義された動作を、決められた範囲で正確に繰り返すことに強みがありました。一方、Physical AIでは、現場で起きた失敗、環境差、部品のばらつき、作業者との距離、予期しない物体配置などが、次の学習材料になります。
重要なのは、ロボットが一度作られて終わりではなく、現実の経験を吸収しながら改善され続ける点です。 この考え方に立つと、競争軸は「どのロボットがすごいか」から、「どの企業が学習ループを止めずに回せるか」へ変わります。
必須要素チェックリスト: 本稿でPhysical AIと呼ぶものは、最低限次の4つを満たします。
- ① 身体:センサー+アクチュエータを持ち、環境を読み、物理世界に働きかける
- ② 閉ループ:行動ログ・失敗ログが学習・評価へ戻り、改善が回る
- ③ Sim↔Real:シミュレーションと現実が分断されず、相互に更新される
- ④ 運用OS:更新・監視・安全・認証・責任分界まで、運用として回る仕組みを持つ
この定義に立つと、Physical AIの本質は「ロボットの身体」だけではありません。身体、学習データ、シミュレーション、本番運用、保守、責任分界がつながって初めて、事業として成立するのです。
なぜSim2RealがPhysical AIの核心なのか
仮想で完璧に動いたロボットが、現場初日に止まる。この「転送の壁」を超える鍵が、Sim2Realの双方向ループです。

ロボット開発で最も難しいのは、仮想空間ではうまく動いたのに、現実ではうまく動かないことです。床の摩擦、照明、センサー誤差、部品のばらつき、作業対象物の変形、人の割り込み。こうした現実世界の“揺らぎ”は、単純なプログラムでは吸収しきれません。
そこで重要になるのが、Sim2Realの双方向ループです。仮想環境で大量に試し、現実で動かし、現実の失敗ログを再び仮想環境へ戻す。この循環が回るほど、ロボットは現場に強くなります。
- Sim:仮想空間で大量の試行・失敗・評価を行う
- Real:実機や現場で、実際の摩擦・誤差・例外を経験する
- Feedback:現場ログを収集し、シミュレーション条件や学習データへ戻す
- Redeploy:改善されたモデルや制御を、安全に再配備する
このループが弱いと、PoCでは動いても本番で止まります。逆に、このループが強い企業は、現場の例外を学習材料に変えながら、導入先ごとに性能を高められます。
Physical AIの競争は、ロボット単体の競争ではなく、Sim↔Realループの回転数を競う戦いだと捉えると、各社の発表や関連銘柄の見方が大きく変わります。
2026年に何が変わったのか
名前を覚えるだけでは意味がありません。重要なのは、設計・検証・学習・本番推論がひとつの流れとしてつながり始めたことです。
ここで重要なのは、OpenUSD、Omniverse、Isaac Sim、Cosmos、GR00Tといった名称を覚えることではありません。本質は、設計・検証・学習・本番推論が分断されず、ひとつのループとして回り始めたことです。
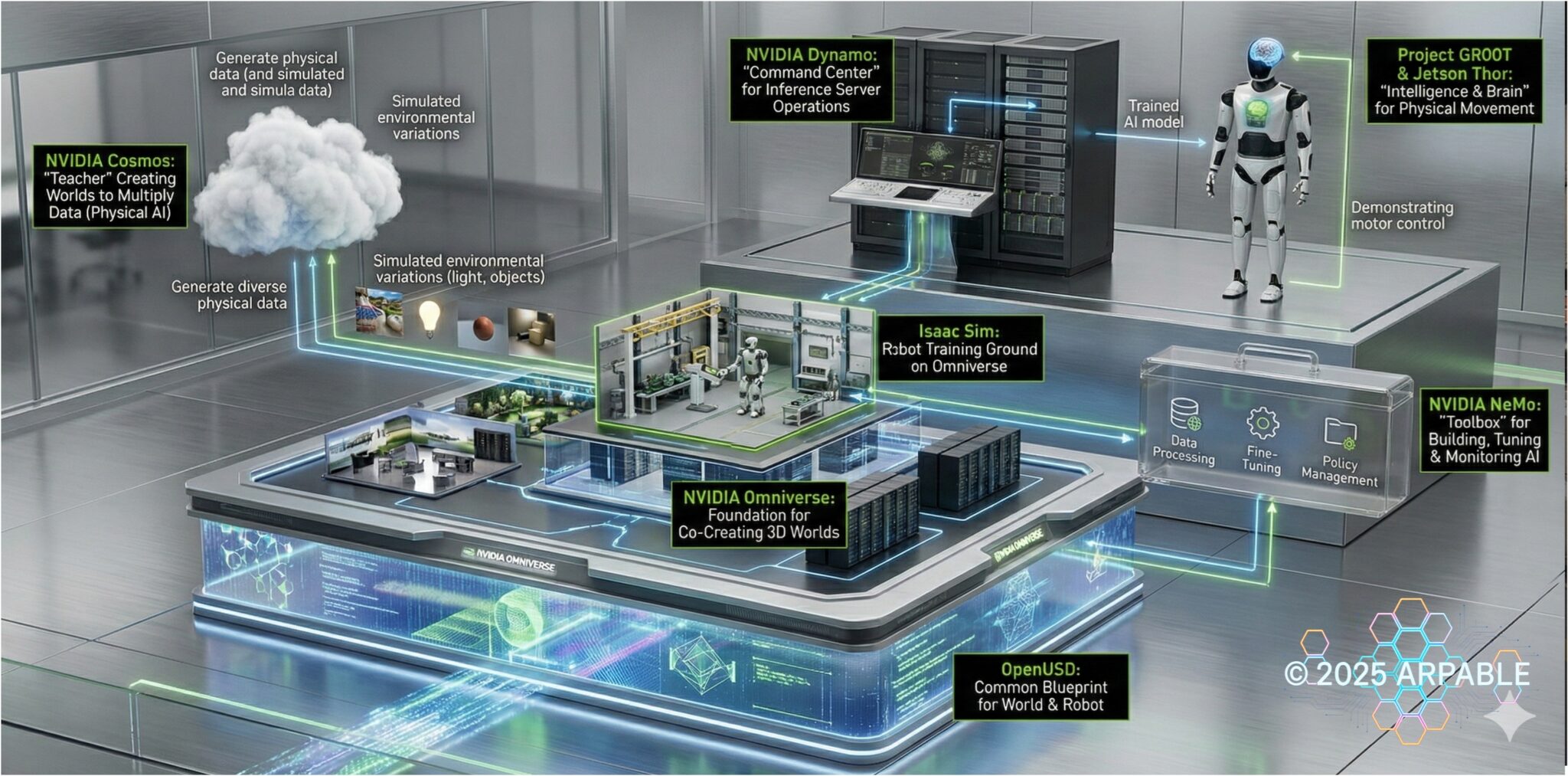
NVIDIA Cosmosは、物理世界を理解する世界基盤モデルとして、ロボットや自動運転などのPhysical AI開発を支える文脈で語られています。NVIDIAはCosmosを、物理的に整合した世界シミュレーションや閉ループでの行動評価に使う構想を示しています。
また、Isaac GR00Tは、ヒューマノイドロボティクス向けの基盤モデルとデータパイプラインを加速する開発基盤として位置づけられています。つまり、Physical AIは「ロボットを作る話」から、ロボットを継続的に学習・評価・再配備する基盤を作る話へ移っているのです。
- OpenUSD:工場・ロボット・センサーを共通の設計図として記述し、工程とデータの分断を減らす
- Omniverse:仮想空間上で設計・検証・協業を進めるための基盤
- Isaac Sim:仮想空間で大量試行し、失敗データも含めて学習材料を増やす
- Cosmos:物理世界を理解し、シミュレーションや合成データ生成を支える世界基盤モデル
- GR00T:ヒューマノイド等の行動生成に向けた基盤モデル・データパイプライン
- 運用基盤:本番推論、監視、ロールバック、再配備を安全に回す仕組み
この流れを一言で言えば、「AIがロボットを動かす」から「AIがロボットを育てる」への移行です。ここに、Physical AIの大きな投資テーマがあります。
SO-101実践で見るSim2Realの現実
Physical AIを理解する一番の近道は、巨大工場の未来予測ではなく、小さなロボットで現実のズレを体験することです。
Physical AIやSim2Realは、大企業の巨大ロボット開発だけの話ではありません。SO-101のような小型ロボットアームを使えば、模倣学習、Behavior Cloning、カメラ視野設計、キャリブレーション、URDF/USD変換、Isaac Sim連携などを、実際の手触りとして理解できます。
Arpableでは、SO-101を使ったPhysical AI実践を継続的に記事化しています。これは単なる工作記録ではなく、「仮想で学ぶ」「現実で動かす」「差分を見つける」「再び学習へ戻す」というPhysical AIの核心を、小さな実機で先取りする試みです。
| 実践テーマ | 学べること | 関連するPhysical AI論点 |
|---|---|---|
| キャリブレーション | 実機の個体差、原点、関節範囲、センサー誤差の扱い | SimとRealのズレ |
| Behavior Cloning | 人間の操作データから動作を学習する流れ | 学習燃料としての現場データ |
| カメラ視野設計 | 何を見せるとロボットが学習しやすいか | センサー設計とデータ品質 |
| URDF/USD変換 | 実機構造をシミュレーションへ持ち込む方法 | デジタルツインとSim2Real |
| Isaac Sim連携 | 仮想環境での検証と現実への転用 | Sim↔Realループ |
SO-101の価値は、安価なロボットアームであることだけではありません。Physical AIを「知っている」状態から、実機のズレや失敗ログを通じて理解する状態へ進める点にあります。
Physical AI時代の勝ち筋は4レイヤーで決まる
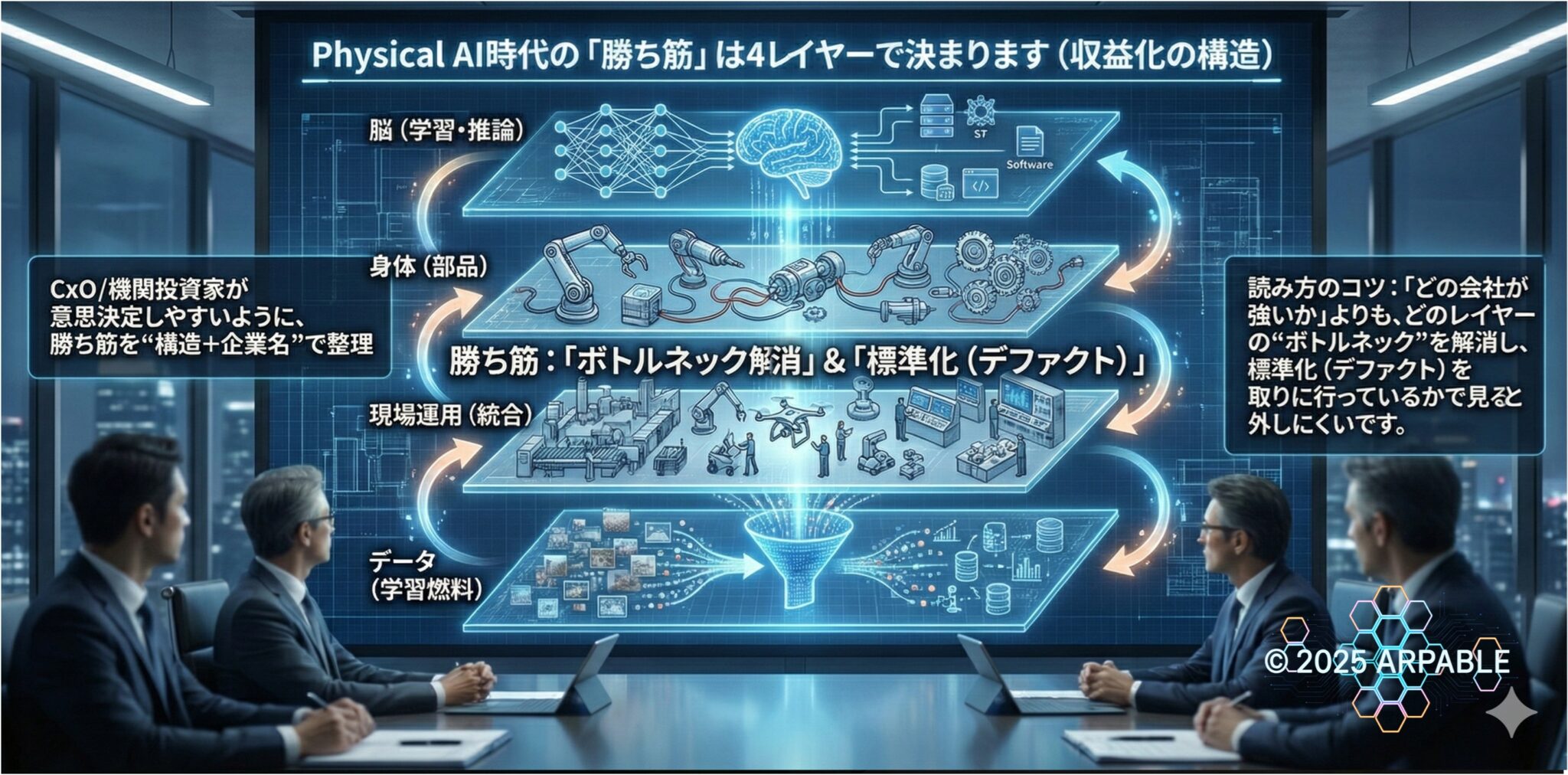
「ロボット関連銘柄」をひとまとめに見ると見誤ります。価値は、脳・身体・運用OS・学習燃料のどこを握るかで変わります。
Physical AIは、ロボットの性能だけでは勝敗が決まりません。価値は、脳/推論、身体/部品、運用OS、学習燃料の4レイヤーに分散します。関連銘柄を見るときも、「どの企業が有名か」ではなく、どのレイヤーのボトルネックを握っているかを見る必要があります。
| レイヤー | 企業名(代表例) | 投資家/CxOが見るべき要点 |
|---|---|---|
| 脳と推論(計算・エッジ) | NVIDIA、ルネサス、Lattice Semiconductor など | 物理世界の不確実性をリアルタイムに推論・補正するには高密度の演算が必要です。遅延・電力・熱・更新運用まで含めて見る必要があります。 |
| 身体・部品 | ハーモニック、ニデック、村田製作所、KYB、NOK など | 量産局面では、価格よりも耐久性、保守性、ばらつき管理が差になります。採用部品が固定化すると、長期的な収益機会になり得ます。 |
| 運用OS | SoftBank×ABB、Siemens、Foxconn、日立製作所、大手SI など | 最大の落とし穴はPoC止まりです。責任分界、認証、保守、更新、監視を回る仕組みにできるかが収益化を決めます。 |
| 学習燃料 | AIRoA、製造・物流・インフラ運用企業群、データ同盟 | 将来的に取り分を決めるのはデータ主権です。失敗ログ、センサー同期、評価基盤の整備が学習速度を左右します。 |
学習燃料とは、実運用データ、失敗ログ、センサー同期データ、シミュレーション生成データなど、知能更新を回す元データです。ここを握る企業が、Physical AIの改善速度を握ります。
産業用ロボットBig 4と市場構造の変化
シェア表だけを見ても、次の勝者は分かりません。見るべきは、誰が現場データと運用OSに近い場所を取るかです。
産業用ロボット市場では、ABB、ファナック、安川電機、KUKAのような既存Big 4が大きな存在感を持っています。しかしPhysical AI時代には、単なるロボット本体のシェアだけでは競争力を測れません。
競争軸は、ハード性能から、運用OSとデータ主権へ移り始めています。 どの企業が稼働データを握るのか。誰が更新・監視・認証の標準を握るのか。誰が物流から製造まで一気通貫で回せるのか。ここが市場構造を見るうえで重要です。
| 企業名 | 本社 | 世界シェア推計 | 直近業績・関連情報 | 状況・備考 |
|---|---|---|---|---|
| ABB Robotics | スイス | 13%前後の公開推計あり | SoftBankがABBのRobotics事業を$5.375Bで取得する契約を発表 | 買収の意味は、ロボット本体よりも運用OS・データ主権・AIロボティクス統合にあります。 |
| ファナック(FANUC) | 日本 | 11%前後の公開推計あり | ロボット部門で強い量産品質と現場信頼を持つ | Physical AI時代は、既存の量産品質に知能をどう外付け・標準化するかが焦点です。 |
| 安川電機(Yaskawa) | 日本 | 8%前後の公開推計あり | 産業用ロボット・モーション制御に強み | 半導体・EV投資などの需要サイクルに左右されやすく、受注・在庫局面も投資判断のポイントです。 |
| KUKA | ドイツ(Midea傘下) | 6%前後の公開推計あり | 欧州製造業・自動車領域に強い | 欧州需要の影響を受けやすい一方、デジタルツインや統合設計で巻き返せるかが焦点です。 |
補足:この表の読み方
- 世界シェアは公開推計であり、市場定義(売上・出荷・設置、地域、対象範囲)により変動します。
- 本記事では、厳密なランキングよりも、各社がどのレイヤーのボトルネックに近いかを重視しています。
- 投資判断では、ロボット本体の売上だけでなく、運用OS、保守、データ、AI基盤との接続を確認する必要があります。
SoftBank×ABB買収は競争軸の移動を象徴する
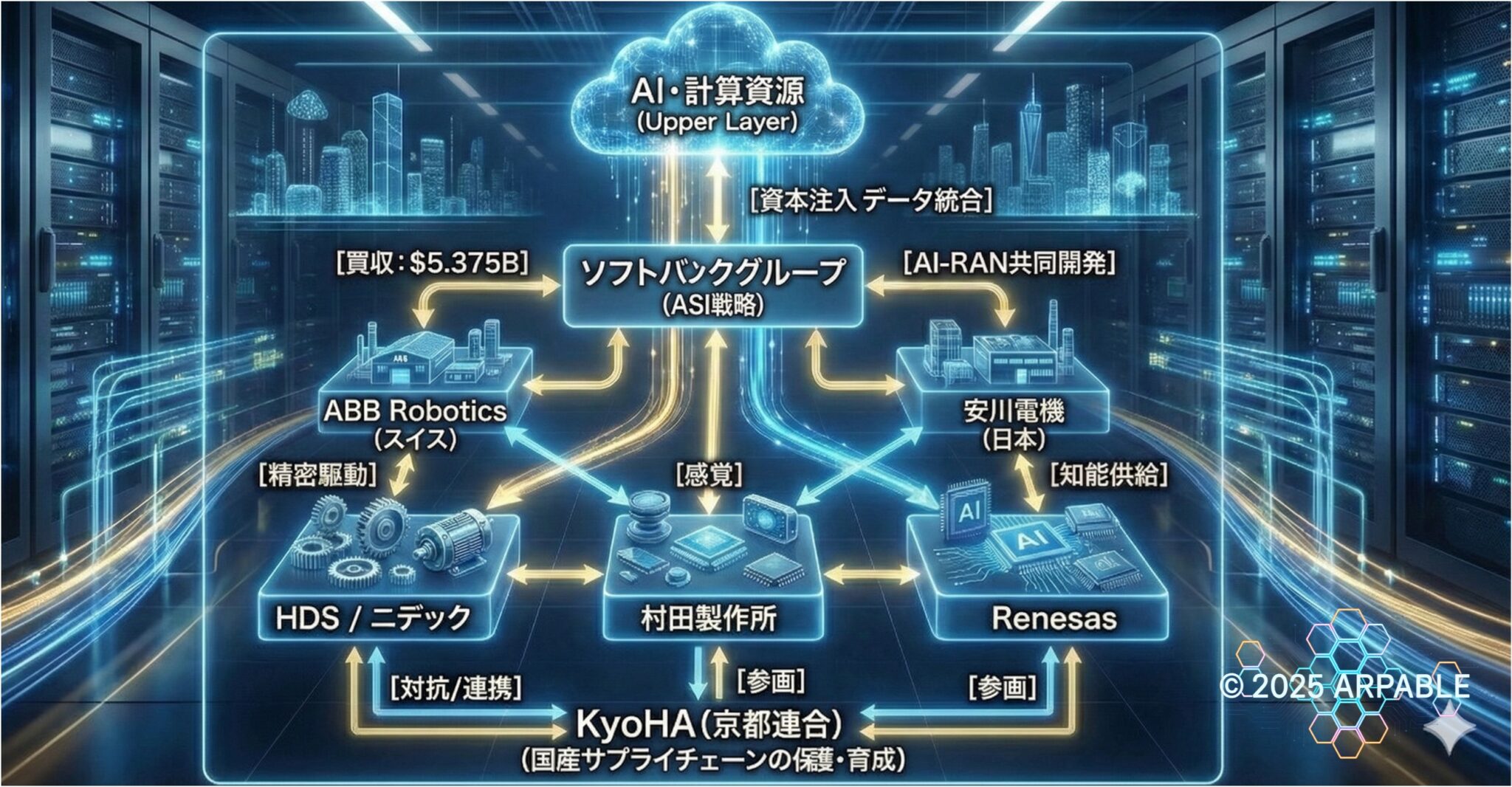
SoftBankによるABB Robotics事業の取得合意は、単なる企業再編ではありません。Physical AIの文脈では、ロボット本体、AI、運用、データを誰が束ねるかという競争軸の移動を示す出来事です。
- ① データ所有者が変わる:ロボットの稼働データ、失敗ログ、保守履歴を誰が握るかが重要になる
- ② 競争軸が変わる:ハード性能だけでなく、更新・監視・認証を含む運用OSで差がつく
- ③ 日本企業は分岐する:標準化の波に乗る側と、部品・装置としてコモディティ化される側に分かれる
この観点に立つと、Physical AI関連銘柄を見るときも、単に「ロボットを作っている会社」だけを追うのでは不十分です。稼働データ、保守、認証、更新、現場統合まで含めて、どの会社がループの中心にいるかを見る必要があります。
日本企業の勝ち筋はどこにあるか
派手なデモでは勝てなくても、止めずに回す設計では勝てる。日本企業の勝ち筋は、そこにあります。
日本企業の強みは、ロボット単体の派手さではありません。強みは、既存産業の現場で止めずに回す運用設計、品質管理、保守、顧客現場との長い関係にあります。
Physical AI時代の日本の対抗軸は、KyoHAのような連合型統合力、AIRoAのようなデータ同盟、日立型の運用工学を重ねることです。ロボット単体の性能で勝つというより、工場・物流・インフラの現場で、双方向ループを安全に回し続ける設計力が問われます。

なお、円安は部品輸出には追い風ですが、GPU投資やクラウド利用には逆風にもなります。だからこそ、AIRoAのようなデータ同盟や共同基盤は、データ主権だけでなく、学習コストを抑える意味でも重要になります。
日本企業が目指すべきは、世界で一番派手なロボットを作ることではなく、世界で一番止まらないPhysical AI運用を設計することです。
実務では何から始めるべきか
最初に買うべきものはロボットではありません。まず決めるべきは、失敗をどう記録し、誰が次の学習へ戻すかです。
Physical AIを導入する企業が最初に考えるべきことは、「どのロボットを買うか」ではありません。先に決めるべきなのは、何を学習データとして残し、何を成功・失敗として評価し、誰が更新と責任を持つかです。
- CxO:投資判断は、運用OS、データ主権、量産品質の順で点検する
- 開発統括:Sim↔Realを回す前に、失敗ログ、センサー同期、評価指標、ロールバック手順を仕様化する
- 現場責任者:PoC対象工程を絞り、稼働時間、停止理由、復旧時間、安全条件を記録する
- 投資家:銘柄を、脳・身体・運用OS・学習燃料の4レイヤーで並べ替える
PoCでよくある失敗は、ロボットが動くかどうかだけを見てしまうことです。しかし本当に見るべきなのは、止まった理由が分かるか、再現できるか、次の学習に戻せるかです。これができないPoCは、いくら見た目が派手でも、Physical AIの学習ループにはなりません。
まとめ:Physical AIの本質は「現実から学び続けるループ」にある
未来を語るだけなら簡単です。難しいのは、今日の現場で起きた失敗を、明日の知能に変えることです。
Physical AIは、ロボットがAIを搭載しただけの話ではありません。仮想で鍛え、現実で動かし、現実の失敗を再び仮想へ戻す。その循環を止めずに回すことで、身体を持つAIが現場で育っていく仕組みです。
競争軸は、ロボット単体の性能から、Sim2Real、運用OS、データ主権、学習燃料へ移っています。 だからこそ、Physical AI関連銘柄や企業発表を見るときは、どの会社がどのレイヤーのボトルネックを握っているかを見る必要があります。
実務で始めるなら、まずは大規模導入ではなく、小さなループからです。SO-101のような実機で学ぶ。Isaac Simで仮想検証する。失敗ログを残す。評価指標を決める。現場に戻す。この繰り返しが、Physical AIの本当の入口になります。
Physical AIを「未来のロボット市場」として眺めるのか、それとも「自社の現場で学習ループをどう作るか」という設計課題として扱うのか。 その違いが、2026年以降のロボット活用力を大きく分けます。
ループの最初の一周は、大規模導入ではなく、失敗ログを残す習慣から始まります。
次に読むならこの5本
ここからは、Physical AIとSim2Realを実装・投資・市場の各論へ落とし込むための記事に進めます。
専門用語まとめ
本記事で重要な専門用語だけを、経営判断と実装判断の両方に使える粒度で整理します。
- Physical AI(身体性AI)
- 身体(ロボット、車両、ドローンなど)を通じて物理世界で行動し、その経験データで学習を回すAIシステム体系。
- Sim2Real
- シミュレーションで学習・検証した挙動を、現実の機体や現場で成立させる考え方。現実との差分をどう埋めるかが重要になる。
- Sim↔Realの双方向ループ
- 仮想環境で学習し、現実で検証し、現実の失敗ログを再び仮想へ戻す循環。Physical AIの性能改善を支える中核構造。
- 運用OS
- ロボット導入後に止まらないための統合、保守、認証、責任分界、更新、監視を回す仕組み。本稿では比喩的に使っている。
- データ主権
- 失敗ログ、センサー同期、評価基盤などの学習燃料を、誰が所有・利用・共有できるかという競争軸。
- 4レイヤー
- Physical AIの価値が乗る場所を「脳/推論」「身体/部品」「運用OS」「学習燃料」の4層で捉える本稿独自の整理。
よくある質問(FAQ)
Physical AI、Sim2Real、関連銘柄の見方で迷いやすい論点をFAQで整理します。
Q1.
Physical AIは、従来のロボットと何が違うのですか?
A1. 「プログラムされた動作」ではなく、身体の経験データで学習が回る前提で設計される点が違います。
- 現場で得た経験が、学習・評価・再配備へ戻る閉ループを持ちます。
- 可視化で終わるデジタルツインではなく、Sim↔Realの循環で性能を高めます。
Q2.
Sim2Realとは何ですか?
A2. シミュレーションで学習・検証した動きを、現実のロボットや現場で成立させるための考え方です。
- 仮想空間では、現実では危険・高コストな失敗を大量に試せます。
- ただし、現実には摩擦、照明、センサー誤差、部品ばらつきがあるため、現実のデータを再び学習へ戻すことが重要です。
Q3.
Physical AI関連銘柄を見るときのポイントは?
A3. 銘柄名だけでなく、脳/推論・身体/部品・運用OS・学習燃料のどのレイヤーを握っているかを見ることです。
- ロボット本体メーカーだけでなく、半導体、部品、運用基盤、データ同盟にも価値が分散します。
- 一時的な話題性よりも、継続的な導入・保守・データ蓄積に近い企業を確認する必要があります。
Q4.
日本企業の勝ち筋はどこにありますか?
A4. 単独のスター企業よりも、部品、現場運用、データ同盟、保守を束ねる連合型の強みにあります。
- 日本企業は、現場で止めずに回す品質管理・保守・工程設計に強みがあります。
- Physical AIでは、この強みをデータ主権や運用OSと結びつけることが重要です。
主な参考サイト・出典
本記事では、公式発表・仕様・標準化団体・一次データを優先し、必要な二次情報は補助的に使っています。
一次情報・公式系
- SoftBank Group – Acquisition of ABB Ltd’s Robotics Business
- ABB – ABB to divest Robotics division to SoftBank Group
- NVIDIA Cosmos – Physical AI with World Foundation Models
- NVIDIA Isaac GR00T – Generalist Robot 00 Technology
- Unitree G1 – Official Product Page
- Unitree G1 – Official Shop
- 経済産業省
- AIRoA(一般社団法人AIロボット協会)
補助的な二次情報
あわせて読みたい
Arpable編集部が、本記事の理解と実装に直結する関連記事を厳選しました。
更新履歴
本記事は、一次情報の補強、構成改善、読者導線の最適化に応じて継続的に見直します。
- 2026年1月13日:初版公開
- 2026年3月17日:H1・導入文・章要約・シリーズ導線・FAQ・関連記事導線をArpable記事テンプレ v10.2.1に合わせて改善
- 2026年6月4日:Physical AIとは/Sim2Real/SO-101実践/4レイヤー/関連銘柄判断軸を中心に再構成。本文内H1を削除し、Arpable記事テンプレ v11.3 に合わせて冒頭・内部リンク・FAQ・参考文献を整理








