※本記事は継続的に最新情報へアップデートしています。
ある工場の自動化責任者が、朝一番にIsaac Sim上のロボット検証結果を確認する。夜間に仮想空間で数百パターンの失敗と学習を繰り返し、その結果をもとに実機側の制御方針を見直す——そんな開発の前提が、静かに現場へ入り始めています。
ロボット開発は今、「動作をプログラムする仕事」から「AIに何を学ばせるかを設計する仕事」へと変わり始めています。その中核にあるのが、Sim2Real――シミュレーションで学習・検証した行動を、現実でも成立させるための設計プロセス――です。
本記事では、NVIDIA Isaac時代の設計原理を、SO-101で体得できる「BC→Sim2Real→Fine-tuning」の流れに圧縮し、Sim2Realに渡すべき本当の入力を整理します。
✅ 先に結論
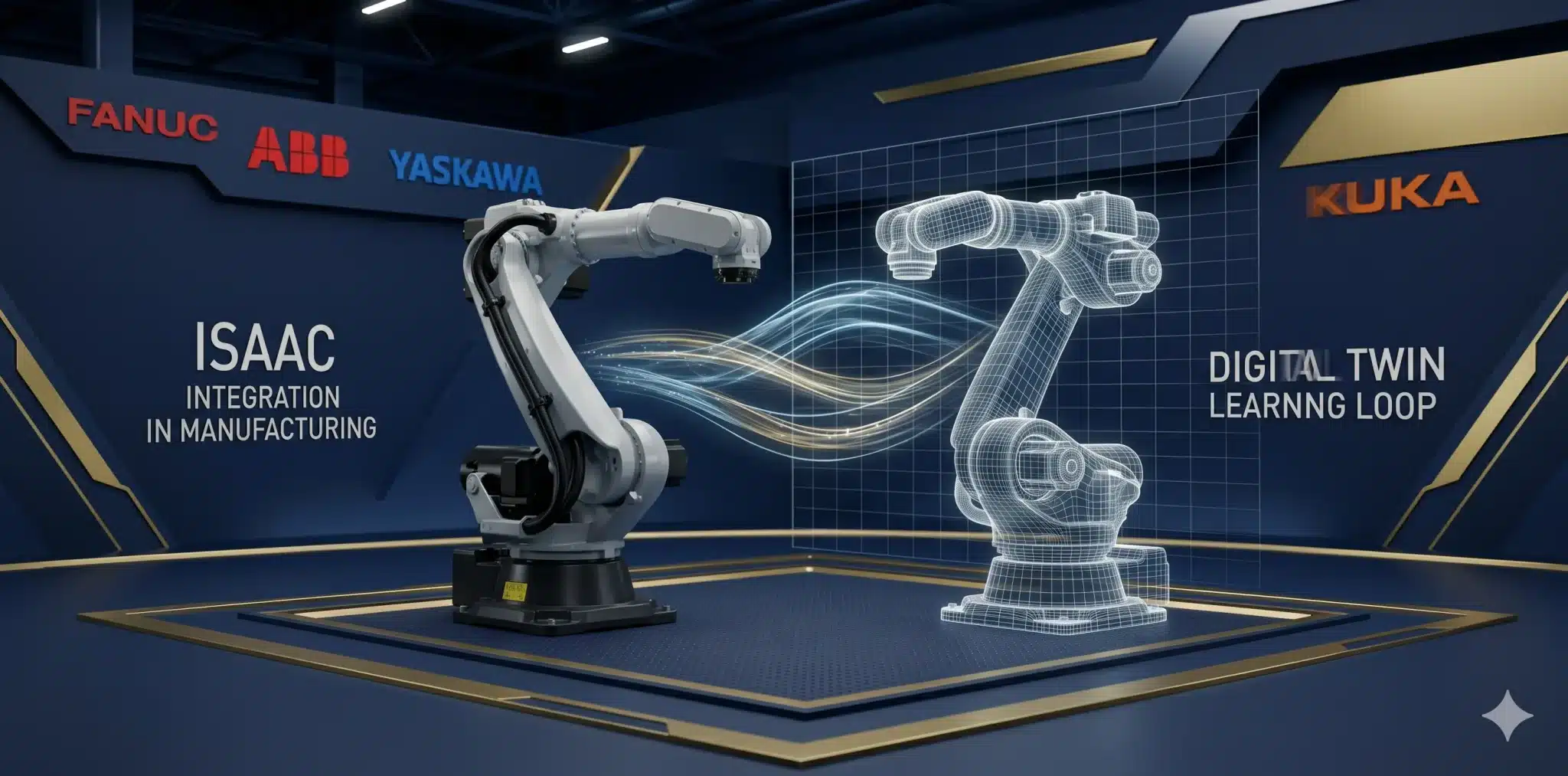
- Isaacの現実化:FANUC、ABB Robotics、YASKAWA、KUKAが、NVIDIA OmniverseとIsaacを仮想コミッショニングへ統合・連携する動きを進めている。
- 設計者の変化:ロボット開発は「動作を書く」仕事から、「AIに何を学ばせるかを構想する」仕事へ変わりつつある。
- Sim2Realとは:シミュレーションで学習・検証した行動を、現実でも成立させるための設計プロセスである。
- SO-101の価値:BC→Sim2Real→Fine-tuningを手元で体験することで、Isaac時代の設計原理を小さく学べる。
- 最大の誤解:Sim2Realに渡すのはBCデータそのものではない。必要なのは、身体の定義、場の定義、成功の定義である。
- 本記事の役割:詳細実装は関連するSO-101実践記事に譲り、本記事はIsaac型8ステップとSO-101の3段階をつなぐ設計思想ハブとして機能する。
この記事の著者・監修者 ケニー狩野(Kenny Kano)

役職:(株)アープ取締役。Society 5.0振興協会・AI社会実装推進委員長。中小企業診断士、PMP。著書『リアル・イノベーション・マインド』▶ 詳細はこちら
Isaacはすでに現場へ入り始めている
NVIDIA Isaacは、研究室の実験を超えて、産業ロボットの開発・検証プロセスへ入り始めています。
AIロボット開発は、もはや未来予測の対象ではありません。たとえば、ある工場の自動化責任者が、Isaac Sim上で動くロボットの検証結果を朝一番に確認する場面を想像してみてください。夜間に仮想空間で数百パターンの失敗と学習を繰り返し、翌朝、その結果を踏まえて実機側の制御方針を見直す。そんな開発の前提が、すでに静かに現場で変わり始めています。
NVIDIAは2026年3月、世界合計200万台以上のロボット導入実績を持つFANUC、ABB Robotics、YASKAWA、KUKAが、NVIDIA OmniverseライブラリとNVIDIA Isaacシミュレーションフレームワークを仮想コミッショニングへ統合・連携する動きを進めていると発表しました。
ここで重要なのは、Isaacが単なる「ロボット用シミュレータ」ではないという点です。Isaacは、現場を仮想空間に写し、ロボットを試し、AIを学習させ、実機へ戻し、さらに運用データで育て続けるための開発基盤として位置づけられ始めています。
従来、ロボット開発の競争軸は、ハードウェアの精度、耐久性、制御性能にありました。もちろん、それらは今でも重要です。しかしPhysical AI時代には、それだけでは足りません。
| 従来の競争軸 | Physical AI時代の競争軸 |
|---|---|
| ロボット本体の性能 | デジタルツインで検証できるか |
| 制御プログラムの完成度 | 学習ループを回せるか |
| 実機テストの経験値 | 仮想空間で大量に失敗できるか |
| 個別現場への調整力 | 現場差分をデータとして再学習できるか |
| ※ Arpable編集部作成(2026年6月版) | |
つまり、ロボット開発は「作ってから試す」世界から、「仮想空間で試し、学ばせ、現実に戻す」世界へ移っています。
この全体像をより広い技術地図として把握したい場合は、AI×ロボット革命の核心技術とは?脳・身体・エネルギーで読む未来展望【2026年版】で、AIチップ、身体、アクチュエーター、電源までを俯瞰できます。
エンジニアの仕事は「書く」から「学ばせ方を構想する」へ変わる

Physical AI時代の中心は、ロボットの動作を愚直に書く力から、自律的に学ぶための学習条件を設計する力へ移行します。
従来のロボット開発では、人間が動作を細かく分解し、位置、角度、速度、条件分岐をプログラムしてきました。
たとえば、対象物がこの位置にあればアームを何度動かす。
このセンサー値ならグリッパーを閉じる。
エラーが出たら停止する。
このような設計は、環境が安定している工場では強力でした。しかし、現実世界は毎回同じではありません。
物体の位置は少しずれます。照明は変わります。摩擦も変わります。カメラの見え方も変わります。アームの動きにも微妙な誤差が出ます。
すべての例外を人間が書き切ることはできません。
だからこそ、Physical AI時代のエンジニアに求められる力は変わります。ロボットの動作を1つずつ書く力だけではなく、AIに何を見せ、どんな環境で試させ、何を成功とみなすかを構想する力が重要になります。
ロボット開発の主語は、次のように変わります。
人間がどう動かすか。
ではなく、
AIにどう学ばせるか。
これは、エンジニアの価値が下がるという意味ではありません。むしろ逆です。AIが動作を学習する時代ほど、「この現場で、AIにはどこまでを任せ、どこからを人間が握るのか?」を定義できるエンジニアの価値は、これまで以上に上がります。
この変化は、ソフトウェア開発におけるAI駆動開発ともつながっています。コードを書くこと自体よりも、目的、制約、評価条件、品質ゲートを設計する力が重要になるという流れは、バイブコーディングの先へ|AI駆動開発で問われるエンジニアの構想力でも扱っているテーマです。
SO-101はIsaac時代の設計原理を小さく体得する入口である
SO-101の価値は、Isaac時代の学習ループを小さな実機で体験できる点にあります。
NVIDIA Isaacの全体像を、いきなり理解するのは簡単ではありません。
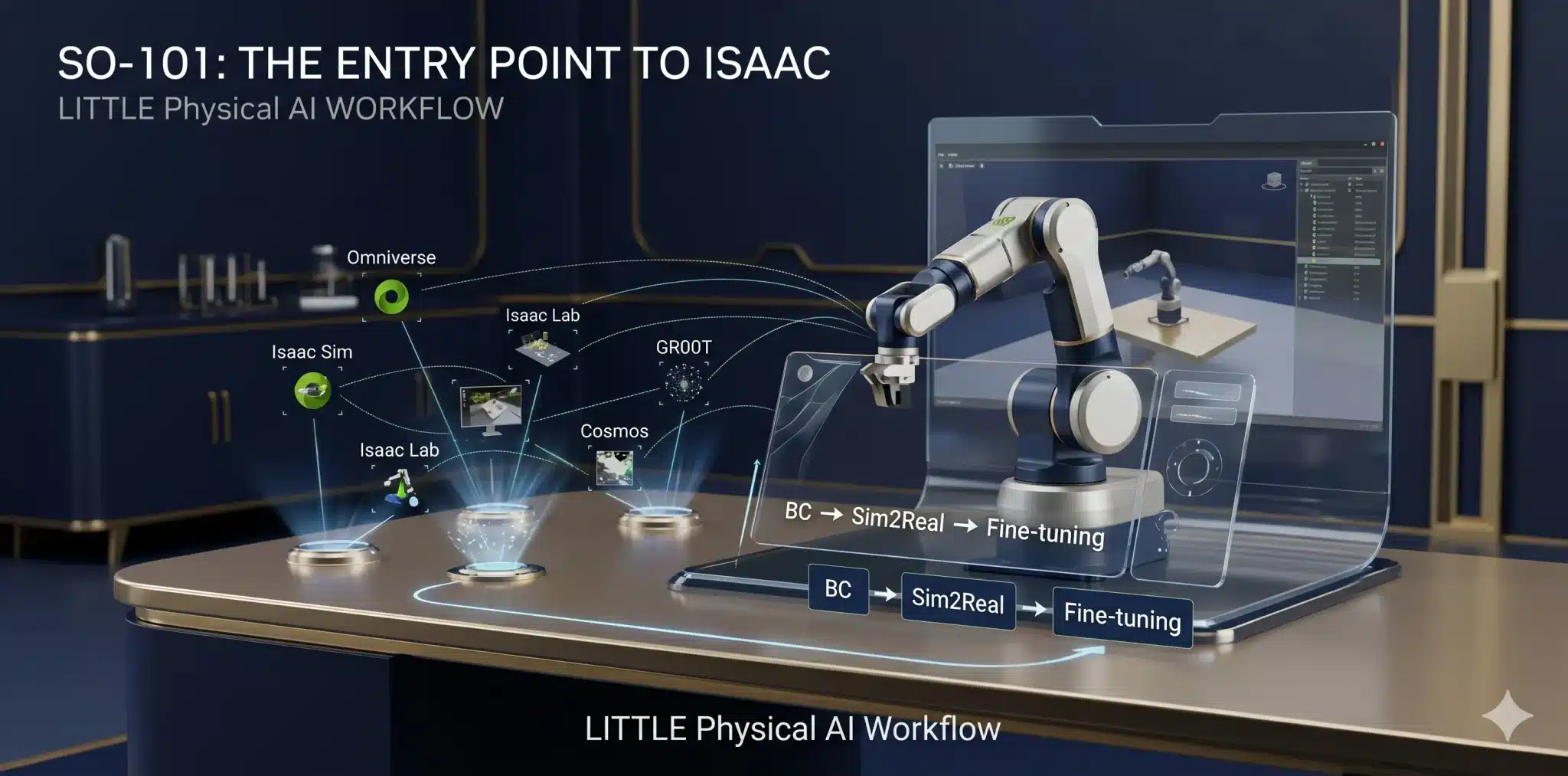
Omniverse、Isaac Sim、Isaac Lab、Isaac GR00T、Cosmos、Halos。
それぞれが重要な役割を持っていますが、最初から全体を把握しようとすると、読者はツール名の森に迷い込んでしまいます。なお、NVIDIA Halosは、Physical AIを産業・インフラなどの実環境へ展開する際に参照する、安全認証・サイバーセキュリティ・AI安全の枠組みです。SO-101教材そのものの直接工程ではなく、産業スケールへ進む段階で接続する安全基盤として扱います。
ここで誤解してはいけないのは、SO-101がNVIDIA製ロボットだという意味ではないことです。SO-101は、NVIDIA Isaac型の開発思想を小さな実機で理解するための実践教材として位置づけると、価値が見えやすくなります。
そこで有効なのが、SO-101です。
NVIDIAのSO-101向けLearning Pathでは、SO-101ロボットアームを使い、シミュレーションから実機へ移すPhysical AIワークフローを体験します。内容には、SO-101のキャリブレーション、テレオペによるデモデータ収集、GR00T N1.6を使ったVLAモデル訓練、シミュレーション評価、実機展開、Domain Randomization、Co-training、Cosmos Augmentation、SAGE+GapONetなどが含まれています。
ただし、LeRobot、Isaac Lab、GR00Tのバージョンや連携方法は今後も更新される可能性があります。そのため本記事では、個別ツール名の細部よりも、開発ループの構造そのものに焦点を当てています。
つまりSO-101は、単なる入門用ロボットアームではありません。Isaac時代のロボット開発で必要になる、次の流れを小さく体験できる入口です。
- 人間がお手本を見せる
- データを取る
- 仮想環境で条件差を試す
- 実機に戻して差分を見る
- 失敗をもとに再学習する
この流れを、SO-101では BC → Sim2Real → Fine-tuning として体得できます。
SO-101での学習ループそのものを詳しく知りたい場合は、SO-101で学ぶPhysical AI|Behavior CloningからSim2Real・Fine-tuningまでの設計原理が技術的支柱になります。本記事は、その上位に立つ統合ハブです。
BC→Sim2Real→FTは、Isaac型開発ループの圧縮版である
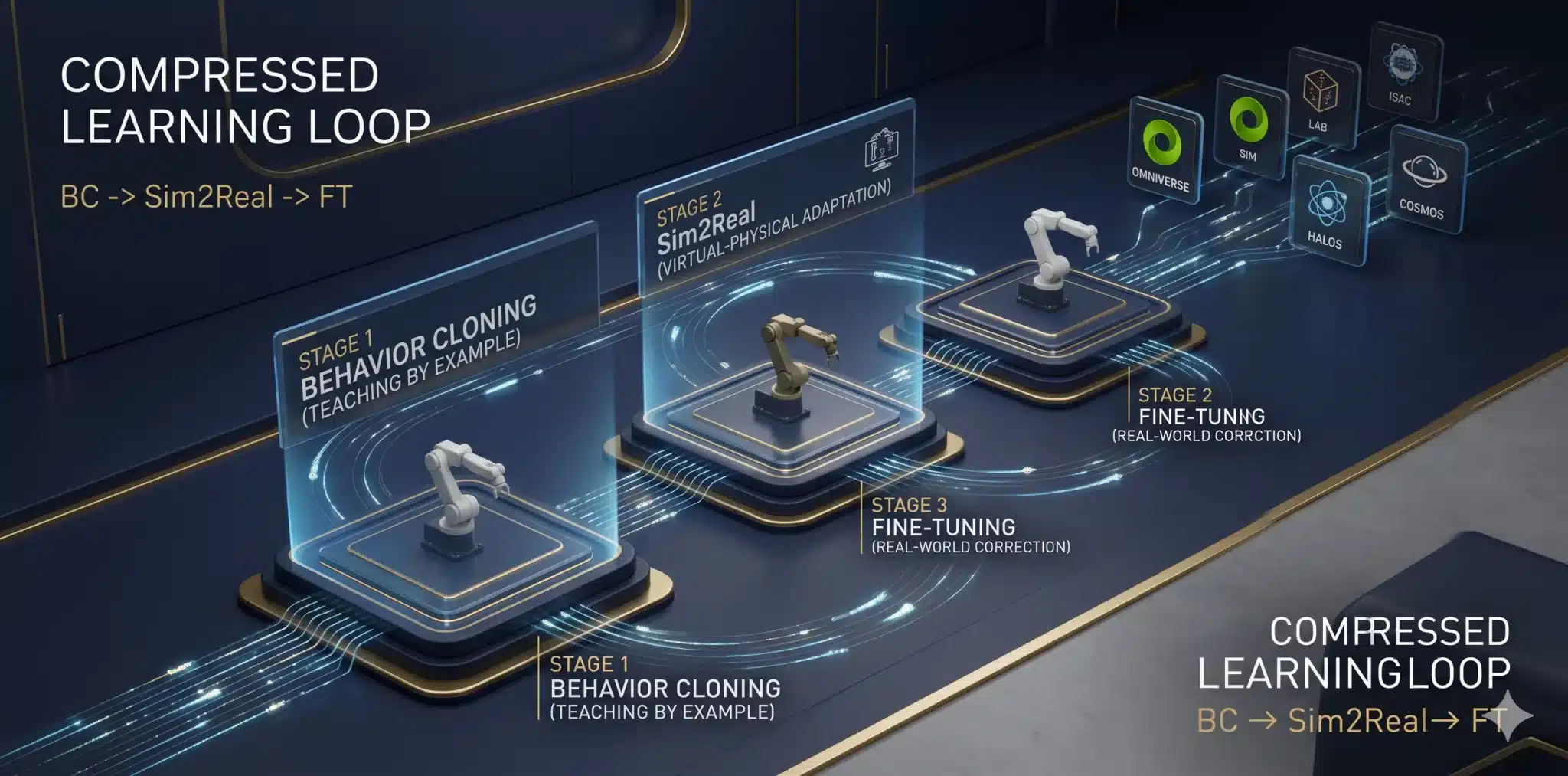
BC→Sim2Real→Fine-tuningは、Isaac型開発ループを小さく体験する圧縮版です。
Sim2Realとは、「シミュレーションで学習・検証したロボットの行動を、現実環境でも成立させるための設計と検証のプロセス」です。
SO-101で学ぶべきなのは、単にロボットを操作する方法ではありません。本当に学ぶべきなのは、学習型ロボット開発の設計ループです。
ここでは、SO-101の3段階を次のように整理します。
| SO-101の3段階 | 役割 | エンジニアが設計すること |
|---|---|---|
| BC | 人間のお手本から基本動作を学ぶ | 何を見せるか、どんなデータを取るか |
| Sim2Real | 仮想環境で条件差に耐える | 身体・場・成功条件をどう定義するか |
| Fine-tuning | 実機に戻して補正する | 現実との差分をどう埋めるか |
| ※ Arpable編集部作成(2026年6月版) | ||
この3段階は、独立した作業の寄せ集めではありません。BCで得たお手本、Sim2Realで設計する仮想環境、Fine-tuningで得る現実差分は、1本の学習ループとしてつながっています。そしてこのループは、NVIDIA Isaac型の大規模開発をSO-101という小さな実機で分解したときにも、同じ構造として現れます。
NVIDIAのSO-101教材では、Sim-to-Realは「シミュレーションで訓練したポリシーを実機へ展開するプロセス」として扱われています。シミュレーションと現実の差は、センシング、アクチュエーション、物理、モデル化などから生じると説明されています。
ここで重要なのは、BC、Sim2Real、Fine-tuningが独立した作業ではなく、1つの学習ループだということです。この3段階の各ステップがIsaac型8ステップのどこに対応するかは、後続の対応表で整理します。
最大の誤解──Sim2Realに渡すのはBCデータではない
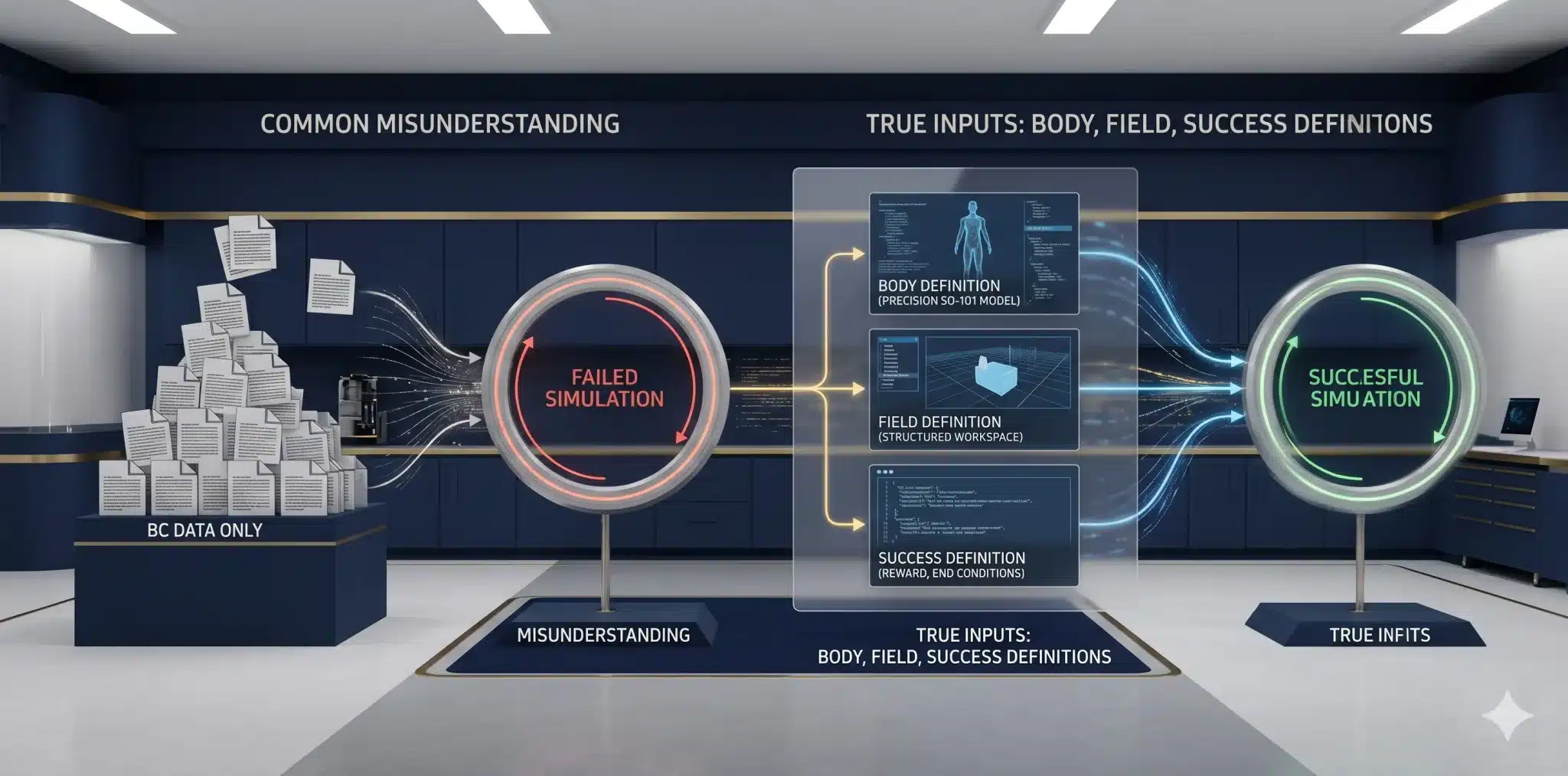
Sim2Realに必要なのはBCデータではなく、身体・場・成功の定義です。
ここが、多くのエンジニアがつまずくポイントです。
Behavior Cloningで人間のお手本を学習させれば、そのBCデータをSim2Realに渡せばよい。
そう考えたくなります。
しかし、それは誤解です。
BCデータが示すのは、あくまで「人間がこの状況でこう動かした」というお手本です。もちろん重要なデータですが、それだけではSim2Realは成立しません。
Sim2Realに必要なのは、ロボットがどんな身体を持ち、どんな場で動き、何を成功として試行錯誤するのかという定義です。
例えば、ピッキング作業を学習させる場合を考えてみます。BCでは、「この位置にある物体をこう掴む」という人間の動作を学びます。しかしSim2Realでは、それだけでは不十分です。「照明が変わっても認識できるか」「摩擦が変わっても落とさないか」「物体の位置が少しずれても成功とみなすか」といった条件を設計する必要があります。
| Sim2Realに必要な定義 | 意味 | 詳細記事 |
|---|---|---|
| 身体の定義 | ロボットがどんな形、関節、センサー、可動域を持つか | Sim2Realに渡す3つの情報 |
| 場の定義 | どんな作業空間、対象物、照明、摩擦、カメラ条件で動くか | Sim2Realに渡す3つの情報 |
| 成功の定義 | 何ができれば成功で、何を失敗とみなすか | Sim2Realに渡す3つの情報 |
| ※ Arpable編集部作成(2026年6月版) | ||
BCが教えるのは「人間がどう動かしたか」である。Sim2Realに必要なのは「ロボットがどんな身体で、どんな場で、何を成功として試行錯誤するのか」である。
SO-101でこの3つをどう具体化するかは、何が変わったのか:Sim2Realに渡す3つの情報|身体・タスク・成功基準で詳しく扱います。本記事では、まずこの認識の転換だけを押さえてください。
Isaacの8ステップでは、3つの定義はどこで作られるのか
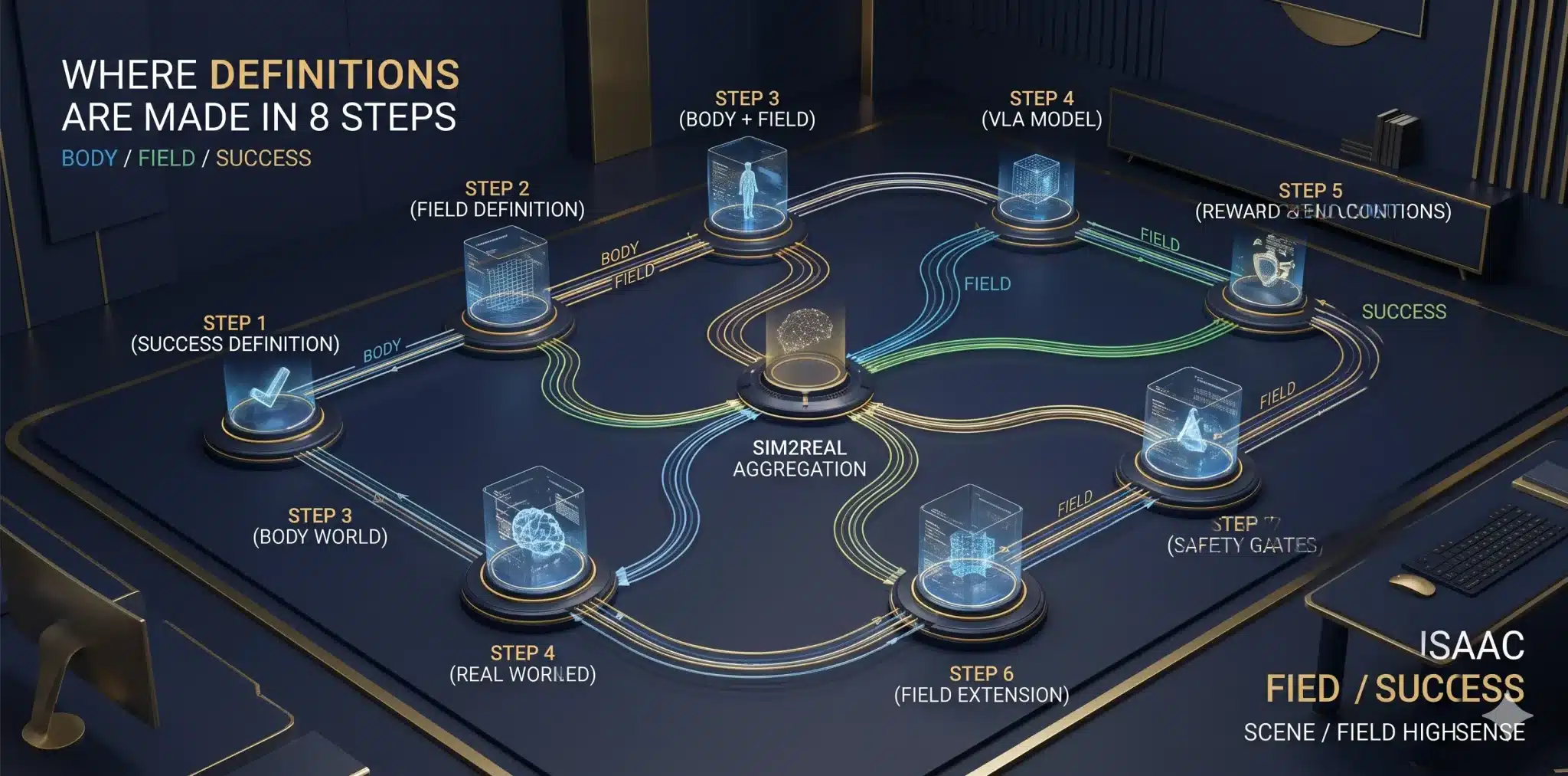
身体・場・成功の定義は、Isaac型8ステップの複数工程で分散して作られます。
ここで扱う「Isaac型8ステップ」は、NVIDIAの公式定義ではなく、NVIDIAのOmniverse、Isaac Sim、Isaac GR00T、Isaac Lab、Cosmos、Halos、SO-101教材で説明されている複数の要素を、読者が理解しやすいように整理した理解モデルです。その前提で、対応関係を整理します。
そのうえで、Sim2Realに必要な「身体・場・成功の定義」は、次のようにIsaac型8ステップの中で分散して作られます。
| Isaac型8ステップ | 主な役割 | SO-101側の対応 | どの定義を作るか |
|---|---|---|---|
| STEP 1 要件定義 | 現場の仕事、合格ライン、安全条件を決める | BC前のタスク定義 | 成功の定義 |
| STEP 2 Omniverse | 現場を仮想空間に写し、レイアウトや光条件を再現する | Sim2Real前提の場づくり | 場の定義 |
| STEP 3 Isaac Sim | 仮想空間で物理・センサー・ロボット挙動を確認する | Sim環境確認 | 身体+場の定義 |
| STEP 4 Isaac GR00T | 視覚・言語・行動をつなぐVLAモデルを準備する | BC/模倣学習のモデル側 | 入出力仕様への接続 |
| STEP 5 Isaac Lab | 学習・観測・行動・報酬・終了条件を設計する | BC+Sim2Realの中核 | 成功の定義を報酬・終了条件へ落とす |
| STEP 6 Cosmos | 想定外条件、視覚変化、シナリオ変化を生成する | Sim2Real強化 | 場の定義を拡張 |
| STEP 7 産業展開時の安全設計/Halos | NVIDIA Halosは、SO-101教材の直接工程ではなく、Physical AIを実環境・産業スケールへ展開する際に参照すべき安全認証・サイバーセキュリティ・AI安全の枠組みです | SO-101の直接対応なし。産業展開段階で接続 | 成功の定義に安全・監視・停止・認証の観点を追加 |
| STEP 8 本番投入・運用 | 実機で差分を収集し、再学習・再検証する | FT/継続改善 | 身体・場・成功を現実データで更新 |
| ※ Arpable編集部によるNVIDIA公式資料の再構成(2026年6月版) | |||
Isaac Labのタスク設計では、観測、行動、報酬、終了条件などを環境側で定義する考え方が示されています。これは、ここでいう「成功の定義」を、学習可能な報酬や終了条件に落とし込む工程と対応します。
また、SO-101教材では、実機側の作業空間としてライトボックス、照明、カメラ、マット、バイアル、ラックを標準化し、Isaac Labのシーンと一致させることが説明されています。これはまさに、現実側とシミュレーション側の「場の定義」をそろえる作業です。
ここから分かることは明確です。
Sim2Realに必要な3つの定義は、ある1つの工程でまとめて作るものではありません。
成功の定義は、STEP 1で始まり、STEP 5の報酬・終了条件へ落とし込まれます。
場の定義は、STEP 2で始まり、STEP 3で物理環境として検証され、STEP 6のCosmosで拡張されます。
身体の定義は、STEP 3でロボットモデルやセンサーとして扱われ、STEP 5の観測・行動空間へ接続されます。
産業スケールに移行する段階では、NVIDIA Halosのような安全認証・サイバーセキュリティ・AI安全性の枠組みが、実環境展開時の重要な参照軸になります。もちろん、STEP 7(Halos)は手元のSO-101教材に直接含まれる工程ではありません。しかし、SO-101で体得した小さな学習ループが、将来どのように産業スケールへ拡張され、安全要件や認証プロセスと接続していくのかを考えるための補助線として、この全体像に位置づけています。
つまり、BCデータは学習材料の1つにすぎません。Sim2Realを成立させる本当の入力は、Isaac型開発ループの前半工程で作られる 身体・場・成功の定義 なのです。
SO-101の3段階はIsaacの8ステップのどこに対応するのか
SO-101の3段階は、Isaac型8ステップを手元で体験するための縮図です。
次に、SO-101の3段階をIsaac型8ステップに対応づけます。
| SO-101の3ステップ | Isaac型8ステップで対応する範囲 | 説明 |
|---|---|---|
| BC:お手本を見せる | STEP 1, 4, 5 | 何を成功とするかを決め、GR00T/VLAモデルに対して、テレオペやデモデータで基本動作を学ばせる。 |
| Sim2Real:仮想で鍛えて現実へ近づける | STEP 2, 3, 5, 6 | Omniverse、Isaac Sim、Isaac Lab、Cosmosを使い、身体・場・成功条件を定義・拡張・検証する。Halosは産業展開段階の安全基盤として、このループの先に位置づけられる。 |
| Fine-tuning:現実差分で補正する | STEP 8、必要に応じてSTEP 5〜6へ戻る | 実機評価で出た失敗をもとに、追加データ、再学習、Cosmos拡張、SAGE+GapONetなどで改善する。 |
| ※ Arpable編集部作成(2026年6月版) | ||
NVIDIAのSO-101教材では、テレオペによるデモ収集、GR00Tを使ったVLAモデル訓練、シミュレーション評価、実機評価が流れとして示されています。さらに、Domain Randomization、Co-training、Cosmos Augmentation、SAGE+GapONetというSim2Real戦略も扱われています。
この対応を一言で表すなら、次のようになります。
BC→Sim2Real→Fine-tuningは、Isaac型8ステップをSO-101で小さく体験するための圧縮版である。
ただし、繰り返しますが、BCの出力がそのままSim2Realの入力になるわけではありません。
BCは「お手本」を作る工程です。
Sim2Realは「身体・場・成功の定義」を使って、現実との差分に耐える学習環境を作る工程です。
Fine-tuningは、実機で出たズレをもとに、その定義やモデルを更新していく工程です。
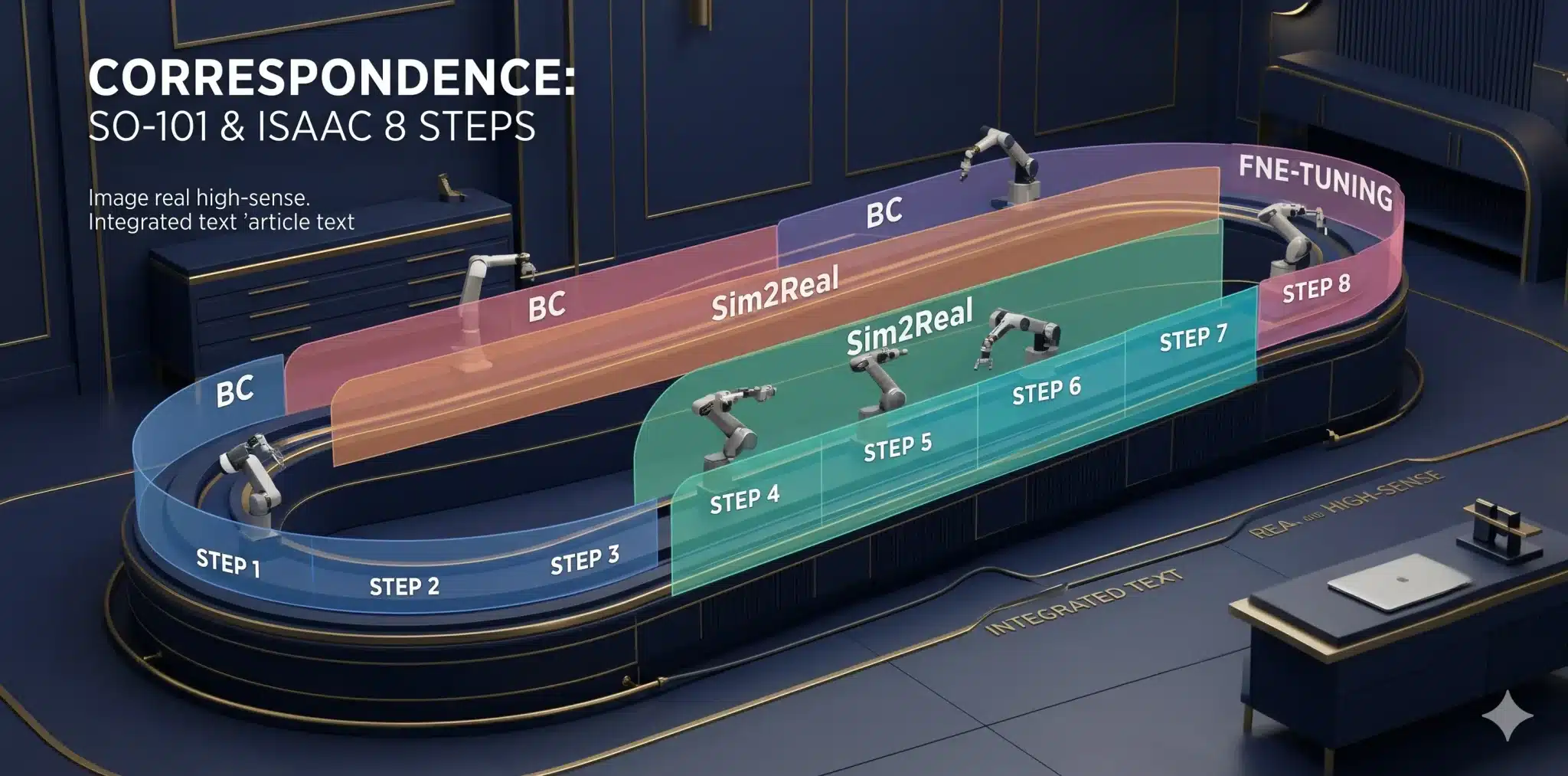
図解:Isaac型8ステップとSO-101の対応
図解で見ると、Sim2Realが複数工程にまたがる学習設計であることが分かります。

この図は、プロ仕様の大規模なAIロボット開発フロー(左側のIsaac 8ステップ)が、小型のSO-101ロボットを使った手元の3つの段階(右側のSO-101段階)へ、どのように「圧縮」されているかを視覚的に分かりやすく示したマップです。
左側に並ぶSTEP 1から8という複雑な工程が、中央の光のラインを通り、右側の「BC」「Sim2Real」「Fine-tuning」という3つの箱へどのように繋がっているかに注目してください。
図1の中央を走る光のラインに注目してください。Sim2Realへと流れ込む複数の帯は、身体・場・成功の定義が単一工程ではなく、Isaac型8ステップの複数工程で分散して作られることを示しています。
中央の「光のライン」が示す、Sim2Realの本当の意味
Sim2Real(シミュレーションから現実への移行)は、単に「BC(お手本学習)の次にこなす独立したステップ」ではありません。図の中央へ集まる光の流れは、Sim2Realを成功させるために、左側の各ステップで設計される以下の3つの要素が欠かせないことを示しています。
- 身体の定義:ロボットがどんな形や可動域を持つか(STEP 3, 5)
- 場の定義:どんな環境や照明、作業空間で動くか(STEP 2, 3, 6)
- 成功の定義:何ができたら合格(報酬)か(STEP 1, 5)
この図は、SO-101が初心者向けの入門ロボットでありながら、その開発プロセス(特にSim2Real)の本質は、プロの大規模な開発サイクル全体を網羅した「横断的な設計」そのものであることを証明しています。SO-101の手元での挑戦は、決して単独のトイ・プロジェクトではなく、世界基準の巨大なロボット開発エコシステム全体の縮図なのです。
左側:Isaac型8ステップの読み方
| ステップ | 意味 | 本記事での位置づけ |
|---|---|---|
| STEP 1 要件定義 | 現場で何を達成すべきかを決める | 成功の定義の起点 |
| STEP 2 Omniverse | 現場を仮想空間へ写す | 場の定義の起点 |
| STEP 3 Isaac Sim | 物理・センサー・ロボット挙動を確認する | 身体+場の定義 |
| STEP 4 Isaac GR00T | VLAモデル/頭脳を導入する | お手本データや観測をモデルへ接続 |
| STEP 5 Isaac Lab | 観測・行動・報酬・終了条件を設計する | 成功条件を学習可能な形へ落とす |
| STEP 6 Cosmos | 想定外条件や視覚変化を増やす | 場の定義を拡張 |
| STEP 7 Halos | Physical AI産業展開における安全認証・サイバーセキュリティ・AI安全の枠組みを提供する | SO-101コースの直接的な工程には含まれない。産業スケール移行時に参照する安全基盤。 |
| STEP 8 本番投入・改善ループ | 現場データを集め、再学習・再検証する | Fine-tuningと継続改善 |
| ※ Arpable編集部によるNVIDIA公式資料の再構成(2026年6月版) | ||
右側:SO-101の3段階の読み方
| SO-101の段階 | 意味 | Isaac型8ステップとの関係 |
|---|---|---|
| BC | 人間のお手本を見せる | STEP 1, 4, 5を小さく体験する |
| Sim2Real | 身体・場・成功を定義し、仮想と現実の差に耐える | STEP 2, 3, 5, 6を小さく体験する |
| Fine-tuning | 実機で出たズレを補正し、再学習する | STEP 8を小さく体験する |
| ※ Arpable編集部作成(2026年6月版) | ||
図の要点:Sim2RealはBCの次に置かれる単純な中間工程ではありません。身体・場・成功の定義を横断的に束ね、仮想と現実の差を埋めるための学習設計そのものです。
なお、産業スケールに移行する段階では、Halosのような安全認証・安全設計の枠組みが、成功条件を安全・監視・停止・認証の観点から拡張します。
SO-101実践記事群で深掘りするAIロボット開発の全体像
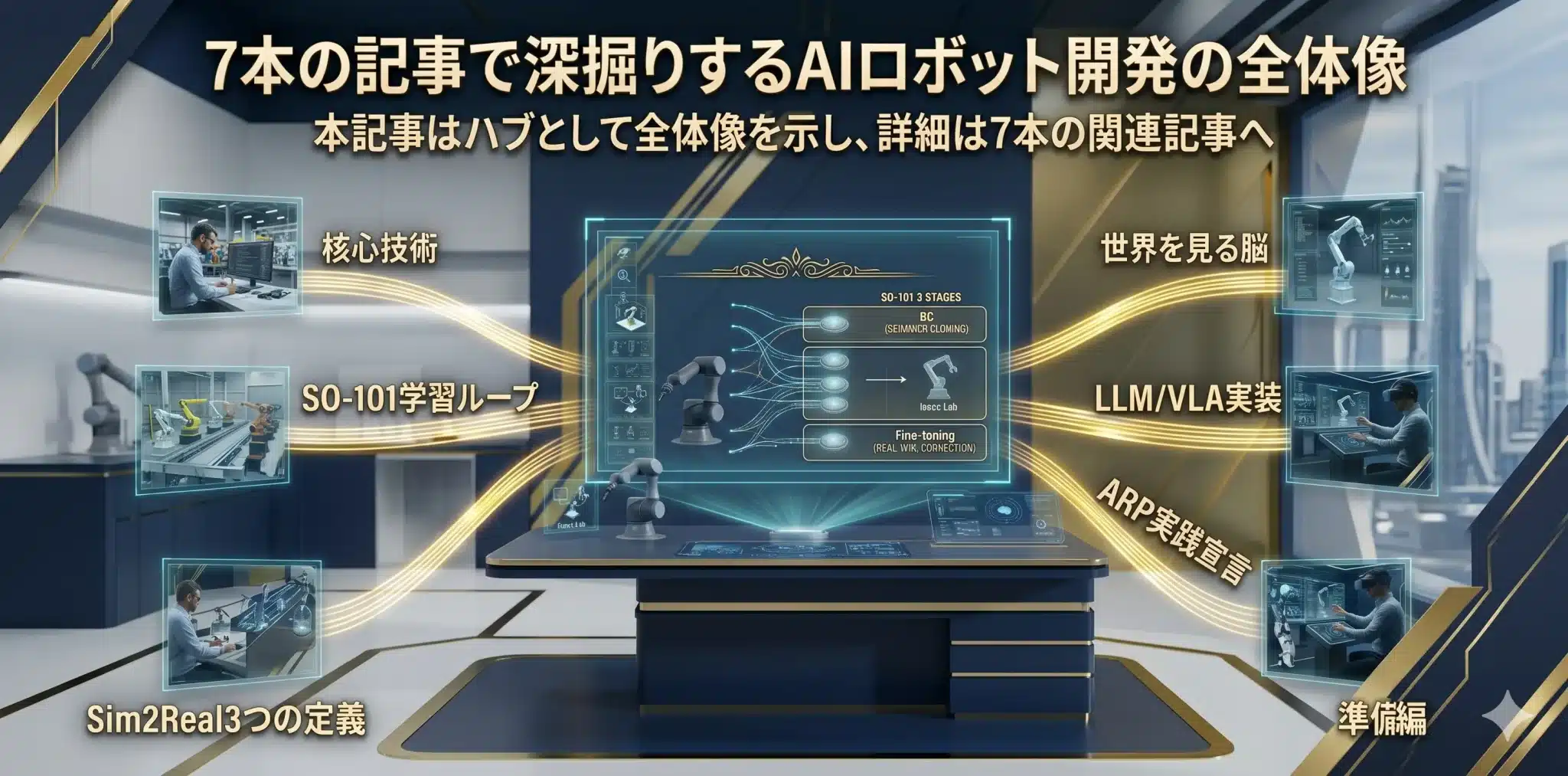
本記事は、SO-101実践記事群を束ねる設計思想ハブです。
本記事は、NVIDIA Isaac型の開発思想とSO-101実践記事群をつなぐ設計思想ハブです。ここでは全体のストーリーを示し、詳細は以下の記事へ委ねます。最初に「設計思想 → 全工程ハブ → 機材準備」の順で読んでおくと、残りの実装記事にもスムーズに入れます。
| 詳細記事 | このハブでの役割 | 任せる詳細 |
|---|---|---|
| SO-101で学ぶPhysical AI|Behavior CloningからSim2Real・Fine-tuningまでの設計原理 | SO-101実践の中核ハブ | BC、Sim2Real、Fine-tuningの全体設計と学習ループ |
| SO-101の機材準備|模倣学習とSim2Realに必要な環境を整理 | 実践前の環境準備 | SO-101 Pro版の電源注意、カメラ、照明、GPU PC、SSD、機材チェック |
| SO-101 Behavior Cloningセットアップ|LeRobotで模倣学習データを採取する実践手順 | BCデータ収集の入口 | LeRobotセットアップ、カメラ配置、Hugging Face Hub、記録コマンド |
| SO-101のSim2Real準備|URDF・USD変換とIsaac Simゲイン調整 | 仮想身体の実装 | URDF、USD、Isaac Sim取り込み、Stiffness / Damping調整 |
| SO-101のSim2Real設計|身体・タスク・Ground Truthを定義する | 最大の誤解を解く詳細記事 | 身体・場・成功基準、Ground Truth、報酬関数、Domain Randomization |
| AIロボット制作プロジェクト 正式キックオフ【2026年版】 | ARP実践の宣言 | なぜやるか、体制、運営、進め方 |
| AI×ロボット革命の核心技術とは?脳・身体・エネルギーで読む未来展望【2026年版】 | 外周の技術地図 | 脳・身体・エネルギー、AIチップ、アクチュエーター、電源 |
| ※ Arpable編集部作成(2026年6月版) | ||
ここで重要なのは、本記事が単なるまとめ記事ではないということです。
本記事は、読者に次の視点を渡します。
ロボット開発は、動作をプログラムする仕事から、AIに何を学ばせるかを構想する仕事へ変わる。
その構想力を体得する入口が、SO-101によるBC→Sim2Real→Fine-tuningである。
各詳細記事は、この中心メッセージを支える補助線として機能します。
ARPのSO-101実践記録は、ここから続いていく
ARPのSO-101プロジェクトは、Physical AIを実践知へ変える継続連載です。
ARPのAIロボット開発プロジェクトは、この記事で完結するものではありません。
現時点では、SO-101のサーボキャリブレーションと、リーダーアーム/フォロワーアームの組み立てが完了しています。次の課外活動では、BCデータ収集の前提となる「SO-101システム接続構造図」を確立する予定です。
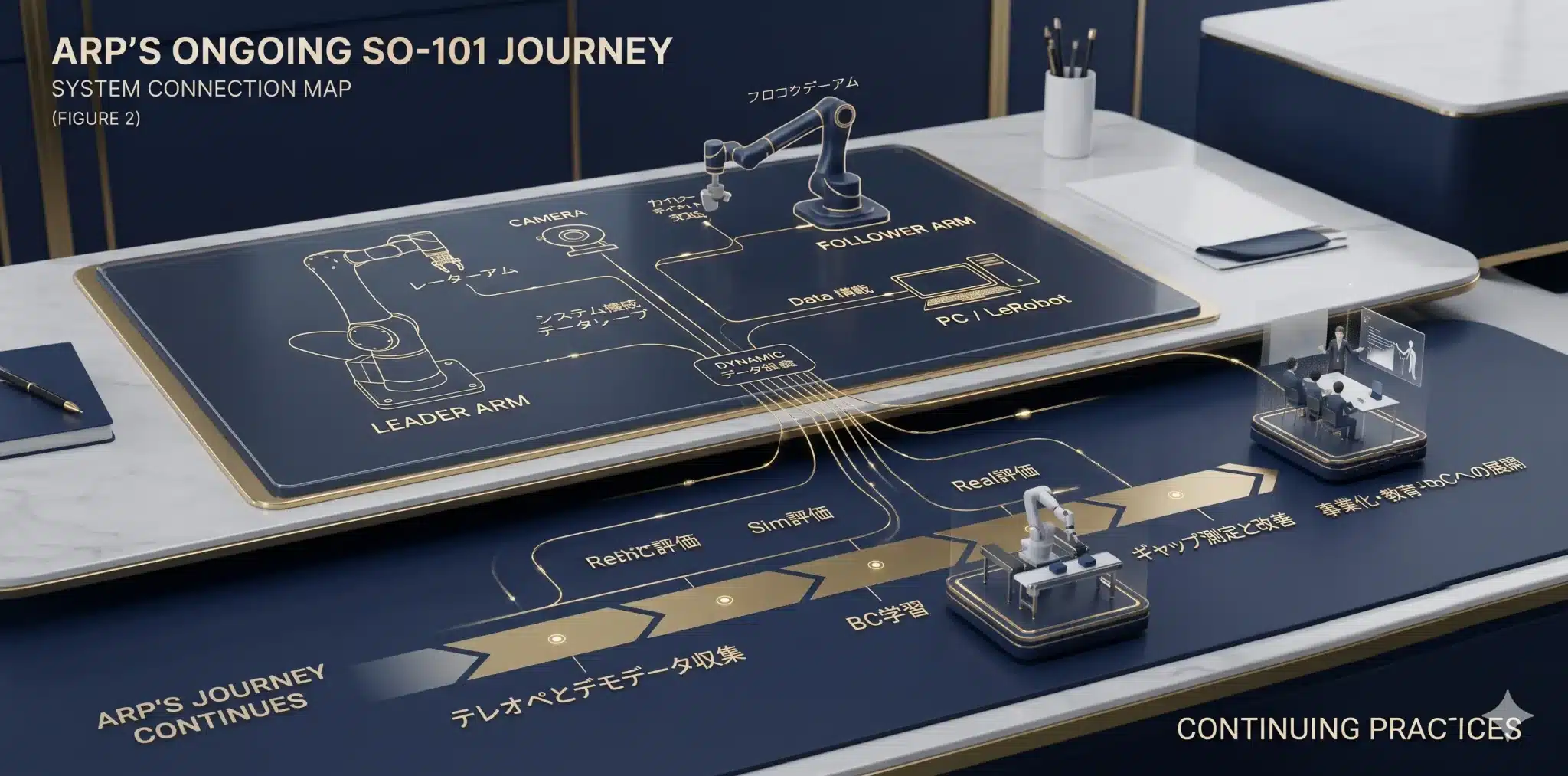
特に重要になるのが、次回公開予定の「図2:SO-101システム接続構造図」に組み込まれる設計原則です。リーダー・フォロワー・カメラ・PCの物理的な関係性と、カメラ視野の要件を、先んじて以下の要素に整理しました。
図2:SO-101システム接続構造図
リーダー・フォロワー・カメラ・PCの関係と、カメラ視野の設計原則
この図では、次の点を明確にします。
| 図2で示す要素 | 意味 |
|---|---|
| リーダーアーム | 人間が操作するお手本生成側 |
| フォロワーアーム | 学習・推論の対象となる実行側 |
| カメラ | フォロワーアームと対象物を観測する視覚入力 |
| PC / LeRobot | 関節角、カメラ映像、タイムスタンプを同期して記録する中枢 |
| カメラ視野 | リーダーや操作者の手を映さず、フォロワーと対象物を中心に収める |
| ※ Arpable編集部作成(2026年6月版) | |
この図は、単なる配線図ではありません。BCデータをどのように生成するかを示す、最初の設計図です。
今後、ARPでは以下のような続編を順次公開していく予定です。
| 続編テーマ | 内容 |
|---|---|
| 初期動作とキャリブレーション(完了) | サーボ、リーダー、フォロワー、接続確認 |
| システム接続構造図 | リーダー・フォロワー・カメラ・PCの関係 |
| テレオペとデモデータ収集 | 人間のお手本をどう記録するか |
| BC学習 | 収集データから基本動作を学ばせる |
| Sim評価 | Isaac Lab上で動作を検証する |
| Real評価 | 実機で動かし、Sim2Realギャップを見る |
| ギャップ測定と改善 | Domain Randomization、Cosmos、SAGE+GapONetへの接続 |
| 事業化・教育・PoCへの展開 | ARPとして何を学び、どう活かすか |
| ※ Arpable編集部作成(2026年6月版) | |
この連載を通じて、ARPはPhysical AIを単に解説するだけでなく、自ら触り、失敗し、学び、提案できる会社を目指します。
プロジェクトの目的や運営思想については、AIロボット制作プロジェクト 正式キックオフ【2026年版】で詳しく扱います。また、実際の機材準備については、SO-101の機材準備|模倣学習とSim2Realに必要な環境を整理へ、Behavior Cloningのセットアップについては、SO-101 Behavior Cloningセットアップへ接続します。
まとめ──SO-101で学ぶべきなのは操作ではなく、構想力である
SO-101で学ぶべき本質は、操作手順ではなく、AIに何を学ばせるかを設計する構想力です。
NVIDIA IsaacとOmniverseが産業ロボットの仮想コミッショニングへ入り始めたことで、ロボット開発の前提は大きく変わりつつあります。これからのエンジニアに求められるのは、ロボットの動作を1つずつ書き切ることではありません。
本記事で押さえるべき3つの要点
- 設計の主役が変わる:ロボット開発は「人間が動作を書く」設計から、「AIに何を学ばせるか」を設計する時代へ移る。
- Sim2Realの入力を誤解しない:Sim2Realに渡すべき中核はBCデータそのものではなく、身体・場・成功の定義である。
- SO-101は縮図である:SO-101のBC→Sim2Real→Fine-tuningは、Isaac型8ステップの設計思想を手元で体験するための入口である。
つまり、Physical AI時代のエンジニアリングでは、「どう動かすか」よりも「どう学ばせるか」が重要になります。AIに何を見せるのか。どんな場で試させるのか。何を成功とみなし、どの失敗を許さないのか。この問いを設計できるかどうかが、ロボット開発の新しい分岐点になります。
SO-101は、その変化を小さく、しかし本質的に体験できる実践環境です。手元のロボットアームでBC、Sim2Real、Fine-tuningを一度体験しておくことで、NVIDIA Isaac、Isaac Sim、Isaac Lab、Cosmosといった大規模な開発基盤の意味も、単なるツール名ではなく一連の学習ループとして理解できるようになります。
ARPのSO-101プロジェクトは、この設計転換を自ら体験し、記事として記録し、実務に使える知見へ変えていくための第一歩です。ロボットをプログラムする時代から、ロボットに学ばせる時代へ。本記事は、その入口としてSO-101を位置づけます。
専門用語ミニ解説
本記事で頻出する用語を、復習用に短く整理します。
| 用語 | 意味 |
|---|---|
| Physical AI | 現実世界を見て、判断し、身体を通じて動くAI。ロボット、センサー、アクチュエーター、学習モデルを組み合わせて実現する。 |
| Sim2Real | シミュレーションで学習・検証したロボットの行動を、現実環境でも成立させるための設計と検証のプロセス。 |
| BC / Behavior Cloning | 人間のお手本動作を記録し、その動きをAIに模倣させる学習方法。 |
| Fine-tuning | 既に学習したモデルを、実機データや特定タスクに合わせて追加調整すること。 |
| SO-101 | AIロボット学習の入門・実践に使える小型ロボットアーム。本記事ではIsaac時代の設計原理を小さく体験する入口として扱う。 |
| Omniverse | NVIDIAが提供する3Dシミュレーション・デジタルツイン基盤。現場や工場を仮想空間として再現する役割を持つ。 |
| Isaac Sim | NVIDIAのロボットシミュレーション環境。仮想空間でロボット、物理挙動、センサー、作業環境を検証する。 |
| Isaac Lab | ロボット学習や強化学習のためのフレームワーク。観測、行動、報酬、終了条件などを設計し、学習ループを回す。 |
| Isaac GR00T | NVIDIAが進める汎用ロボット基盤モデル群。視覚、言語、行動を結びつけるロボットの「頭脳」として位置づけられる。 |
| Cosmos | Physical AI向けの世界モデル基盤。照明、物体配置、視覚条件などの変化を生成し、現実の揺らぎに強い学習を支える。 |
| Halos | Physical AIを実環境や産業スケールへ展開する際に参照する安全認証・サイバーセキュリティ・AI安全の枠組み。SO-101教材の直接工程ではありません。 |
| VLA | Vision-Language-Actionの略。視覚情報、言語指示、ロボットの行動を結びつけるモデル設計の考え方。 |
| ※ Arpable編集部作成(2026年6月版) | |
参考文献 / 出典
一次情報
- NVIDIA Newsroom – NVIDIA and Global Robotics Leaders Take Physical AI to the Real World(2026年3月16日)
- NVIDIA Learning Path – Train an SO-101 Robot From Sim-to-Real With NVIDIA Isaac
- Isaac Lab Documentation – Task Design Workflows
- Isaac Lab Documentation – MDP Managers: Observation, Reward, Termination, Actions
- NVIDIA Halos Certification – Accelerating Physical AI Safety
次に読むならこの記事
補足Q&A
Q1.
Sim2Realに渡すのは、BCで作った学習済みデータではないのですか?
A1.
BCデータだけでは不十分です。
BCが示すのは「人間がどう動かしたか」というお手本です。教材や記事では、このBC部分が強調されることが多いため、「そのままSim2Realに渡せば良い」と誤解されがちです。しかしSim2Realで本当に必要になるのは、ロボットがどんな身体を持ち、どんな場で動き、何を成功とみなすかという定義です。
Q2.
SO-101でNVIDIA Isaacの全体像を学べるのですか?
A2.
全機能ではなく、設計思想を小さく体験できます。
SO-101だけでIsaacの全機能を学べるわけではありません。しかし、BC→Sim2Real→Fine-tuningという流れを通じて、Isaac型開発ループの本質を手元の実機で理解する入口になります。
Q3.
HalosはSO-101の学習工程に含まれますか?
A3.
含まれません。
本記事ではHalosを、SO-101教材の直接工程ではなく、Physical AIを産業スケールへ展開する際に参照すべき安全認証・サイバーセキュリティ・AI安全の枠組みとして位置づけています。
更新履歴
- 2026年6月15日:SO-101クラスターの現行構成に合わせ、関連記事表、内部リンク、SO-101とNVIDIA Isaacの関係、Halosの位置づけを更新。
- 2026年5月17日:初版公開。NVIDIA Isaac型8ステップとSO-101のBC→Sim2Real→Fine-tuningの対応関係を整理し、Sim2Realに渡すべき3つの定義を明確化。
- 2026年5月17日:Halosの位置づけを修正。SO-101教材の直接工程ではなく、産業スケール展開時に参照すべき安全認証・安全設計の枠組みとして明記。
- 今後更新予定:ARPのSO-101実践記録に合わせて、システム接続構造図、テレオペ、デモデータ収集、BC学習、Sim評価、Real評価、Sim2Realギャップ測定の内容を順次反映。